|
|
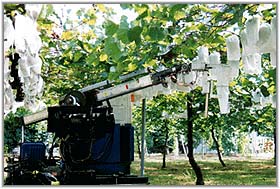
1990年頃にブドウを対象として研究・開発されたのがブドウ用多目的作業ロボットです。総重量が200kgにも及ぶ大型のロボットで、移動部にはクローラー走行台車が使用されています。
ブドウ用多目的作業ロボットは全長1.6m、稼動範囲1mという非常に大きな5自由度の極座標マニピュレーターを備えています。このマニピュレーターはブドウの樹が障害物となるブドウ園での使用を想定し、末端部がCPコントロールにより水平平面上の格子間を一定の速度で稼動することができます。
 (Grapemp4.mov、MPEG4、約14MB)
(Grapemp4.mov、MPEG4、約14MB)
|
|
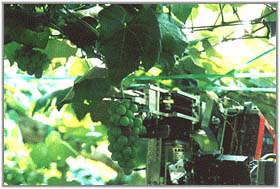
このブドウ用多目的作業ロボットではエンドエフェクタを交換することで様々な作業に対応できるように設計されています。
我々の研究室ではこのロボットのために収穫用、摘果用、袋掛け作業用、スプレーノズルエンドエフェクタを開発し、実験を行いました。
(左図:ブドウ収穫用エンドエフェクタ)
(bagging.mpg、MPEG-1、約1.7MB)
|

|
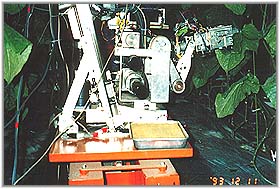
また人間との協調作業を踏まえて、超音波センサによる動体認識が可能で、作業者が接近すると減速、あるいは停止する、といった機能も研究されました。
(左図:人間とロボットの協調作業への安全性)
(safetymp4.mov、MPEG4、約4.7MB)
|



|