|
|
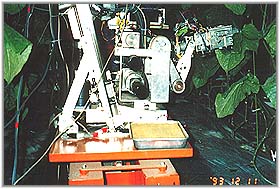
1990年~2001年にかけて、愛媛大学の有馬先生との共同で研究されたこのロボットは傾斜棚プレート栽培のキュウリを対象とした収穫ロボットです。
ロボットを製作するにあたり、果実が棚から吊り下がる形で結実するこの栽培様式に適した6自由度の専用マニピュレーターが開発されました。
 (Cucumber-1.mov、MPEG4、約3.9MB)
(Cucumber-1.mov、MPEG4、約3.9MB)
|
|
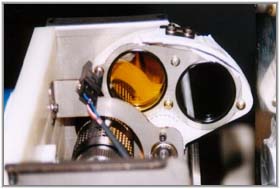
キュウリは果実と葉や茎、および未熟な果実がすべて「緑色」をしているため、果実の検出が非常に困難です。
そのためこのロボットには、フォトセンサによる距離検出や、モノクロカメラのレンズ部に吸光特性の異なる二種類の光学フィルタを取り付け、果実とその他の部分の反射特性の違いを利用した果実の検出(2波長式視覚センサ)など様々な検出法が用いられました。
(左図:二号機の光学フィルタ回転駆動部)
|

|
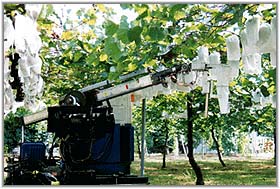
一号機の実験データを元に二号機が開発されました。
二号機ではマニピュレーターの作動領域、操作性、精度の向上をはじめとし、吸着パッドを導入することでエンドエフェクタの簡略化と収穫成功率の向上、視覚部の簡略化などさまざまな改良が行われました。
(Cucumber-3.mov、MPEG4、約2.8MB)
現在、このロボットは有馬先生の元に戻り、実用化に向けて更なる研究が進められています。
|



|