|

|
1995年頃〜2001年にかけて研究されたのがイチゴを対象とした収穫ロボットです。
イチゴには様々な栽培様式があり、「土耕栽培用」と「高設栽培用」の2タイプのイチゴ収穫ロボットが開発されました。この2タイプの収穫ロボットは基本的な機構は共通のものを用い、それぞれが対象とする栽培様式に適したマニピュレーター、エンドエフェクタが開発されました。
 (strbry.mpg、MPEG-1、約1.5MB)
(strbry.mpg、MPEG-1、約1.5MB)
|

|
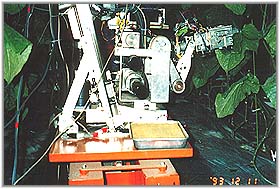
「土耕栽培」では土面の上を這う様にイチゴが生育します。よって土耕栽培用イチゴ収穫ロボットは土面の水平面上を移動し、上方から果実にアプローチする、という形態をもっています。
イチゴは果実が重なりあった状態で結実する他、果実が非常にやわらかくて傷つきやすいため、吸引装置を使うという基本コンセプトで、さまざまな工夫が施されたエンドエフェクタが試作されました。
(左写真:土耕内成り栽培用収穫ロボット)
(Strwbry-s.mov、MPEG4、約3.0MB)
|

|
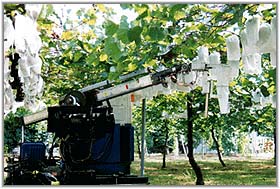
「高設栽培」では高設ベットに植えられたイチゴが垂れ下がるように生育します。高設栽培用イチゴ収穫ロボットはこの高設ベットに引かれたレール上を移動し、横方向から果実にアプローチします。
現在、これらのロボットたちの研究成果を元に、国の研究機関と農機メーカーによる実用化を目的としたプロジェクトが進行しています。
(左写真:高設栽培用収穫ロボット)
(Strwbry-h.mov、MPEG4、約4.8MB)
|


|