|

|
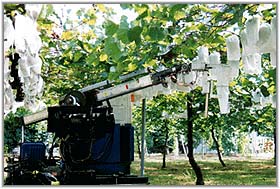
1990年頃に製作されたこのロボットは
「7自由度マニピュレーター」、「エンドエフェクタ」、「視覚部」、「移動部」から構成される、
トマトとミニトマトという二種類の作物を対象とした収穫用ロボットです。
そのため、このロボット用にトマト用、ミニトマト用と二種類のエンドエフェクタが開発されました。
|
|
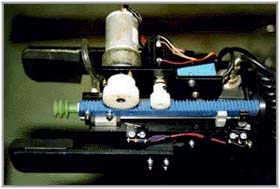
トマト用エンドエフェクタには二本の指と吸着パッドが用いられています。トマトは他の果実や茎と複雑に重なりあって結実するため、収穫対象となるトマトを吸着パッドで引っ張りだしてから二本の指で掴みます。またトマトを果柄から切断する際には、カッターを用いずに、手首部分を左右に反転させることでちょうど人がトマトを収穫する際の「もぎ取る」動きを再現しています。
(左図:トマト収穫用エンドエフェクタ)
 (Tomatomp4.mov、MPEG-4、約12MB)
(Tomatomp4.mov、MPEG-4、約12MB)
|
|
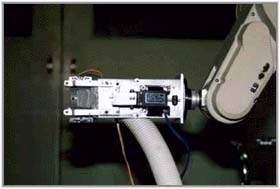
ミニトマト用エンドエフェクタには吸引装置と光センサーが取り付けられています。この吸引装置の吸引力により収穫対象となるミニトマトをエンドエフェクタ内に「吸い込み」ます。次に吸い込んだ果実を光センサーが感知すると、吸口部のシャッターが閉じ、取り付けられたカッターが果柄を切断する機構になっています。
このふたつのエンドエフェクタの基本的な機構は、この後に開発された他の作物を対象とした収穫ロボットにも応用されました。
(左図:ミニトマト収穫用エンドエフェクタ)
(ctomato.mpg、MPEG-1、約1MB)
|


|