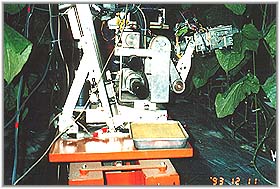
Fig.1 Prottype Cucumber harvesting robot.
 ÅiMPEG4ÅA3.9MBÅj
ÅiMPEG4ÅA3.9MBÅj
|
Fig.1 shows a cucumber harvesting robot (Kondo et al., 1996a). As its manipulator, 6 DOF articulate manipulator was prepared to be able to work in the inclined trellis training system, which was developed for the robotic harvesting system. The training system made fruits hang down from its trellis to be able to detect fruits easily. Its visual sensor should be able to discriminate green fruit from green leaves and stems, since immature fruit is usually harvested.
|
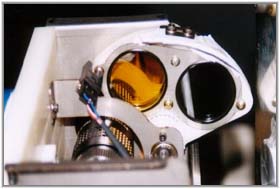
Fig.2 monochrome TV camera with 850 nm wavelength interference optical filter.
|
In this robot, therefore, a monochrome TV camera with 850 nm wavelength interference optical filter was used to discriminate the fruit based on its spectral reflectance (Kondo et al., 1994a). In its end-effector, a peduncle detector, a cutter and fingers were installed, because it is difficult to detect peduncle position by the visual sensor and it is necessary to cut the peduncle.
|

Fig.3 2nd Cucumber harvesting robot.
ÅiMPE4ÅA2.8MBÅj
|
This project is collaborated with an agricultural machinery company.
|