

動 画(WM V): (1)試作ロボット (2)圃場実験 (3)地元テレビ局の取材
背景
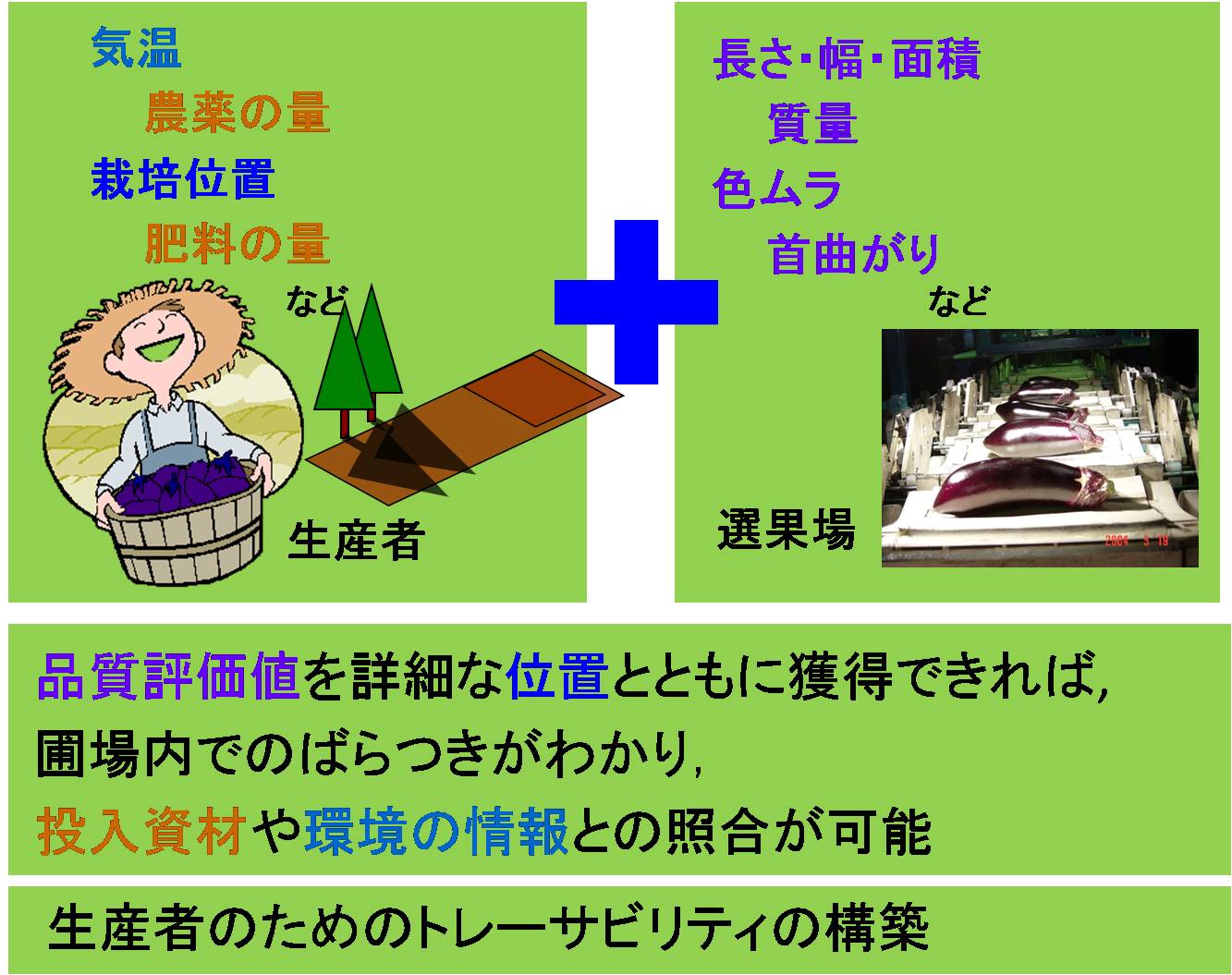
現
在,作物の成育環境や土壌成分などのモニタリング技術とマシンビジョンを用いて高速かつ定量的に農産物の品質評価を行う技術が確立されており,圃場や品質
に関する正確な情報を得ることができる。しかし,農産物は収穫の段階で圃場から分離されるため,圃場および品質に関する情報のリンクが途切れ,一貫した生
産履歴が構築できない。そこで本研究では,農産物の一貫したトレーサビリティの構築を目的に,収穫と同時に品質評価を行う移動型選果ロボットを試作し,基
礎実験を行った。

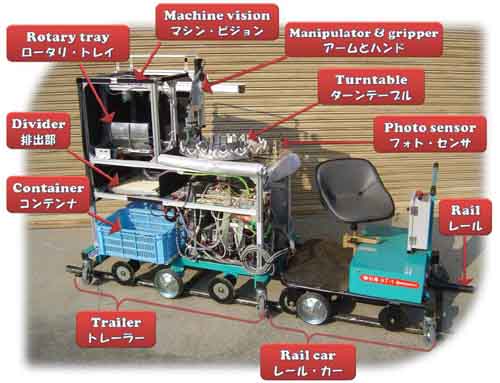
ロボット構成
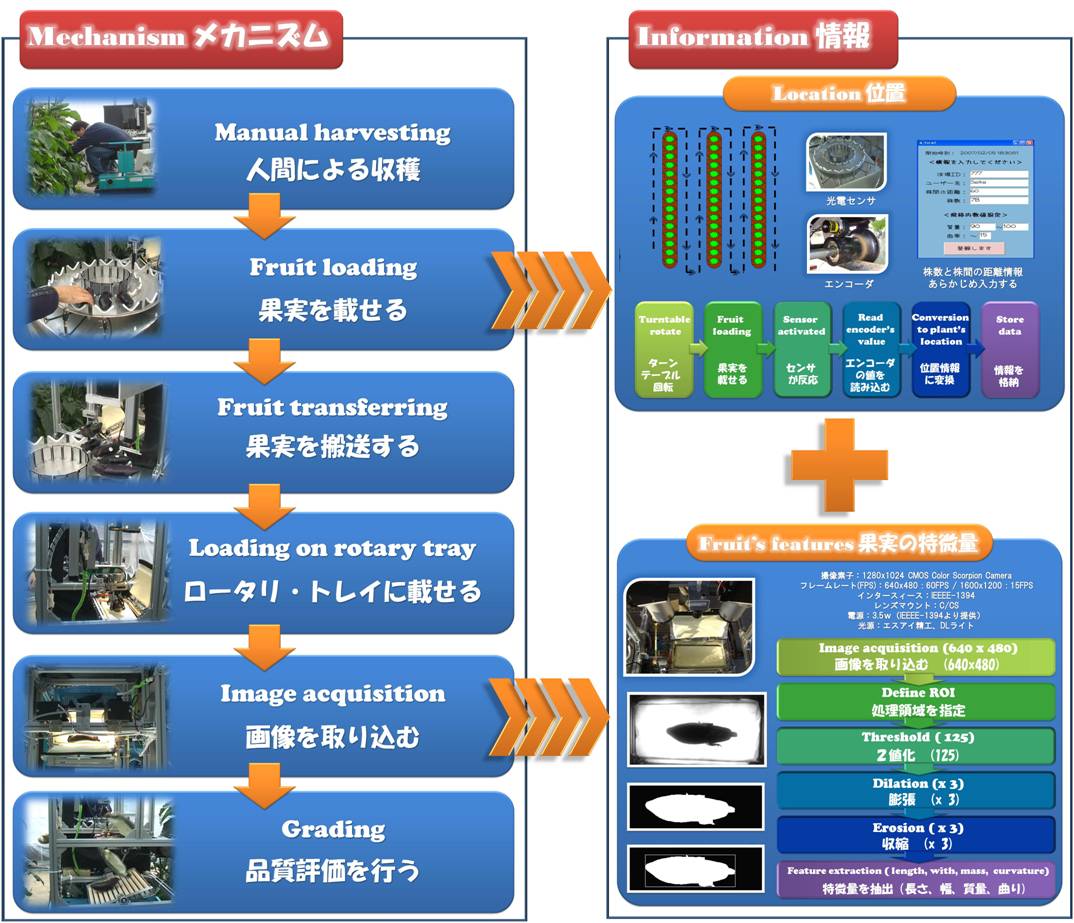
メカニズム
メンバー
| 年度 | 名前 | テーマ | |
| 平成17 | 伴 美央子 | 農産物トレーサビリティ構築のための圃場マッピング | 学部 |
| 平成17 | 杉山 泰郎 | ナスと対象とした移動形選果ロボットーロボットの試作ー | 学部 |
| 平成18 | 清家 千裕 | 移動型選果ロボットによる圃場管理 | 学部 |
| 平成18 | 寺崎 栄一 | 移動型選果ロボットの試作 | 学部 |
| 平成19~ | 寺崎 栄一 | 移動型選果ロボットによる精密農業の検討 | 大学院 |
| 平成17~ | V. K. Chong | ナスを対象とした移動型選果ロボットの開発 | 大学院 |