超音波センサとTVカメラを用いたマニピュレータの障害物回避
超音波センサとTVカメラを用いたマニピュレータの障害物回避
岡山大学 門田 充司・近藤 直・江畑 大樹
1. はじめに
現在までに安全かつ効率的な人間協調型ロボットの開発を目的に、人間を対象とした危険回避のシステムが研究、開発されてきた1、2)。そこで、本研究では人間以外の物体を対象に、センシングシステムによる識別、位置検出ならびにマニピュレータの障害物回避制御を行った。
2. 実験装置及び方法
本実験では、すでに岡山大学で開発されているブドウ管理・収穫用ロボットを用いた。図1に実験装置を示す。センシングシステムとして、物体までの距離を計測する超音波センサと、物体の識別を行う視覚センサをマニピュレータの前方と後方にそれぞれ配置した。ロボットの動作としては、マニピュレータ先端を60°の範囲で直線運動をさせる作業を想定している。また対象物としては、ブドウの木、支柱および葉を想定し、背景に暗幕を設置した。
超音波センサはステッピングモータで180°往復旋回させて検出範囲を拡大した。距離検出は5°ごとに行われ、1回の走査(180°)が完了するごとに、距離情報と旋回角度から各検出点のX、Y座標が算出される。今回は連続して検出点が存在する場合は一つの物体と見なし、しきい値よりも大きな距離情報が連続して3個以上存在すれば別の物体と見なした。同一物体の検出点のXおよびY座標の平均値を求め、その座標を代表点とした。1走査に要する時間は約1秒である。
図1 キュウリ収穫ロボット
視覚センサにはTVカメラを用い、各対象物のRGB色信号と輝度信号によって識別を行った。輝度信号は下記の式で求めた。
Y=0.30R+0.59G+0.11B (1)
まず、RGB色信号の比と輝度信号によって木、支柱および葉を識別し、画素数が15pixel以下(30cm2)のものをノイズとして除去した。次にそれぞれの対象物の中心点のX座標を算出し、超音波センサで検出された代表点のX座標と比較し、その差が200mm以内であれば同一の物体として対応付けを行った。複数の対象物が検出範囲内にある場合にも同様の操作を行い、マニピュレータが回避すべき座標を超音波センサで求められた代表点から決定した。マニピュレータの作業領域内に障害物が存在すれば、その座標のX軸方向200mm手前の地点から回避動作を開始し、回避運動を終了すると再び直線移動に移る。今回は物体が木および支柱であれば回避を行い、葉であれば回避を行わないこととした。
3. 結果及び考察
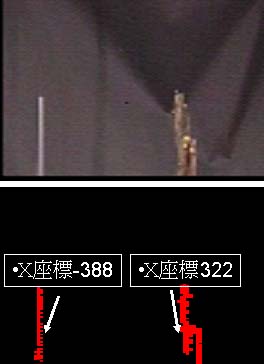
図2-(a)と(b)に超音波センサおよびTVカメラによる検出結果を、図2-(c)にマニピュレータ先端が通過した軌跡を示す。図2-(a)中の●印は超音波センサから得られた距離情報で、+印は算出された対象物の代表点である。対象物はマニピュレータの作業領域内に存在する木と支柱であり、TVカメラによって識別され、両センサで算出された座標のX軸成分の差が28mm(木)と88mm(支柱)であったので対応付けが行われた。マニピュレータは対象物と接触することなく回避運動を行った。今後は、対象として人間も含めたマニピュレータの回避制御を検討し、さらに安全かつ効率的なロボットシステムを構築する必要があると考えた。
|
|
|
|
(a) 超音波センサの検出結果
|
(b) TVカメラの検出結果
|
(c) マニピュレータ先端の軌跡
|
|
図2 実験結果
|