Keywords:イチゴ、マニピュレータ、エンドエフェクタ、水耕栽培、収穫
I.はじめに
近年、果菜類を対象としたロボットの研究が盛んに行われており、そのロボットは、主にマニピュレータ、エンドエフェクタ、視覚装置、移動機構の4つの要素から構成されている。果菜類のグリーンハウスでの水耕栽培は最近増加しており、イチゴにおいては果実がほぼ同一平面内に存在し生育範囲が小さいこと、茎葉等の障害物が果実から分離されていること、果柄の長さがある程度変えられること、小果実であるためロボットの移動が迅速かつ容易にできること等の理由により、ロボット化の行いやすい対象物といえる。本研究では水耕栽培されたイチゴを対象としてマニピュレータ及びエンドエフェクタの試作を行い、その機構を検討した。
II.マニピュレータ
図1に試作した5自由度極座標型マニピュレータの基本機構を示す。本マニピュレータは4つの回転関節(ウエスト、ショルダ、リストピッチ、リストロール)と1つの直動関節(スライドアーム)から構成され、各関節には速度制御を可能とするため、ACサーボモータを使用した。これにより、マニピュレータ手先の水平制御が可能となり、水耕ベッドの下方からの果実へのアプローチも容易に行える。また、ウエストとショルダの間及びリストピッチとリストロールの間にオフセットを設け、マニピュレータの制御を容易に行えるようにした。
III.エンドエフェクタ
図2に、収穫用エンドエフェクタを示す。本エンドエフェクタは主として、吸引ヘッド、ソレノイド及び吸引チューブから構成されており、フィンガ等を用いることなく送風機の吸引力によって果実を取り込むことができる。同時に、吸引方式の採用によって、視覚センサ等で検出された果実の座標誤差を補正することも可能である。吸引ヘッドには3組のフォトインタラプタを設け、ヘッド内で果実の位置検出をした。ソレノイドには果柄を切断可能なカッタを取り付け、リレー回路によってオンオフした。吸引チューブには送風機が接続されており、リレー回路及びリモコンを介してオンオフした。吸引ヘッドとの接続部にはネットを装着し、果実は吸引ヘッド内に残るようにした。
IV.収穫基礎実験
エンドエフェクタをマニピュレータのリストに装着し、以下の手順で収穫基礎実験を行った。まず果実の3次元位置を入力した後、送風機を作動し、マニピュレータを初期姿勢から中間点に移動させる。次に手先を水平制御し、果実位置へ移動する。吸引ヘッドに吸い込まれた果実は、3組のフォトインタラプタによって、その位置が検出され、果実が適当な位置にある場合は、リストロールを回転させ、果柄をヘッド先端の溝に引っかけてカッタで切断する。その位置検出の方法を図3に示す。
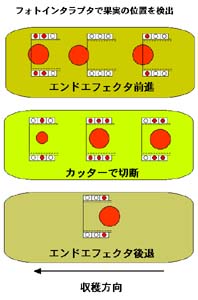
適当な位置にない場合は、マニピュレータを前後に移動させ、適当な位置に誘導する。収穫後はマニピュレータを初期姿勢に戻し、送風機を停止した後、リストピッチを回転させ果実をトレイに移す。この手順で、模型のイチゴを用いて室内実験を行った結果、マニピュレータの水平制御の動作は良好であり、水耕ベッドに衝突せずに収穫が可能であった。またエンドエフェクタの吸引力による収穫は視覚センサ等の座標誤差の補正に有効であり、高速な作業が可能なことが確認できた。
今後はマニピュレータのたわみの補正、及び軟弱果実の特性を考慮した取り扱い等を検討し、視覚部と連結させた実験をする予定である。