農業ロボットの安全システムに関する研究—収穫作業を想定したロボット制御—
山田大暁
1. はじめに
本研究では,安全かつ作業効率のよい人間協調型農業ロボットシステムの開発を最終目標とし,トマト生産施設における収穫作業を想定して,複数の危険度関数に基づくロボット制御方法を検討した。また,トレードオフの関係にある安全性と作業効率を数値化し,評価を行った。
2. 装置および方法
人間に対する危険性の程度を数値化し制御を行うために,危険度関数Dを式(1)で定義した。
 )
)
Lはロボットアーム(以下アーム)の先端部分と人間の頭部の距離,kは係数,iは人間の識別記号,αとβはそれぞれアームが任意の作業中に動く領域(作業領域)と構造上動くことのできる領域(作動領域)に関する係数である。今回は複数の人間が存在する場合を検討したため,各人の危険度をそれぞれ算出し,それらの①最大値,②合計値,③平均値,④重み付け(距離),⑤重み付け(危険度)を求めて5種類の関数を再定義した。これらの関数を用いて作業効率E(危険度による制御をしなかった場合の作業時間/実際に制御をした場合の作業時間)と安全性S(作業効率と同一時間内での危険度の合計値/計測時間)を算出した。なお,SとEは比較しやすいよう上限値を10とした。実験では4人の人間(i = a, b, c, d)を想定した。
3. 実験方法
大規模トマト生産施設での作業を想定し,図1のように10 mの作物列に0.5 m間隔で配置された株に対し,ロボットが走行部で移動と停止を繰り返しながら果実を収穫する動作を想定した。危険度が25を超えると減速し,100を超えると停止するよう設定した。そのため危険度関数①~⑤の算出においても100を上限とした。また,走行装置による移動を行わず,定置で同じ動作を繰り返す場合においても,SおよびEを算出し比較検討を行った。
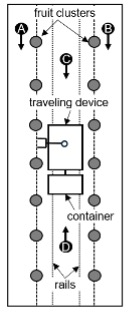
図1 シミュレーション例
4. 実験結果および考察
図2に実験結果例(◇移動あり,●移動なし)を示す。番号は危険度関数を表す。実験の結果,走行部による移動の有無にかかわらず,SおよびEの傾向はほぼ同様であり,安全性と作業効率がトレードオフの関係にあることが示された。また,走行部による移動を行った方が全体的にSの値が低く,Eの値が高い傾向にあった。今後は様々なロボット作業や人間の移動における検討が望まれる。
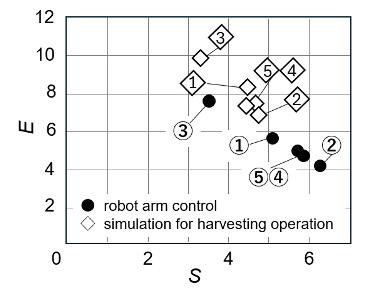
図2 実験結果例