ドローンを用いた‘オーロラブラック’の樹上における着色程度の計測
Measurement of Coloration Levels of ‘Aurora Black’ grape on Trees Using Drone
礒野楓也
1. はじめに
ブドウ栽培では,長い枝に多くの果実を着果させるため,生育期間を通じて細やかな栽培管理を行うことやその状況を日々記録することは難しい。我々の研究ではこれまでに,スマートフォンの動画に物体識別AIを用いることで果房の検出を可能とした。一方で,各果房の位置情報の特定や,正確な色情報の取得に課題があった。そこで本研究では,ドローンを用いて広範囲のほ場を省力的に記録し,パノラマ画像により位置情報を捉えるとともに,果実の着色程度をより正確に計測する方法を検討した。
2. 装置および方法
岡山大学農学部附属山陽圏フィールド科学センターのガラスハウス内で栽培されている,樹齢13年の果樹を対象とした。灌水はタイマーで行われ,果房は袋掛けはせずに栽培されている。仕立て型はWH型で主幹から南北に約10 mの主枝6本で構成されている。主枝までの高さは約1.5 mで中央に主幹があるが,東西の主枝の下に障害物はなくドローンの飛行に適していた。ドローン(DJI,MINI 4 PRO)を,高度1.0 m,移動速度約1.0 m/sで手動操縦にて飛行させた。撮影は仰角60 °に設定したドローンのカメラで,果房を前方上方に見上げながら南北それぞれの方向から7–10月に動画で行なった。パノラマ画像はこれまで我々が行ってきた,各フレームをパターンマッチングで繋ぎ合わせる方法で作成した。作成したパノラマ画像から果房周辺領域を抜き出し,果房の色情報をRGB値で抽出後,L*a*b*色空間へ変換した。また正確な色情報を取得するために,12箇所の房から定期的に最上部の果粒をサンプリングし,色彩色差計(MINOLTA,CR-300)で計測した。
3. 結果および考察
Fig. 1に示すようにパノラマ画像合成は良好に行え,画像中の座標として各果房に位置情報を付与できるようになった。
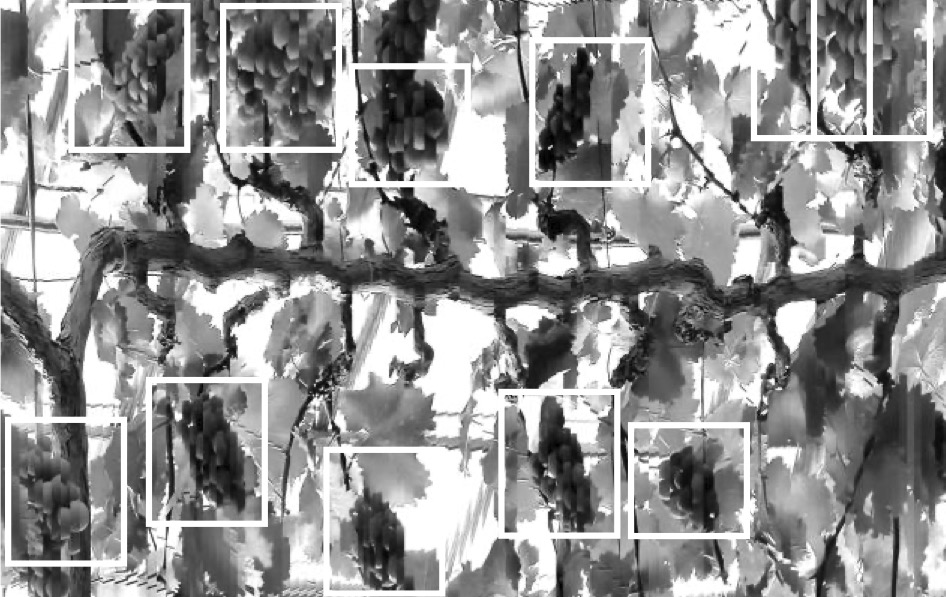
Fig. 1 An example of panoramic images
常に逆光の条件下であったが,南中時の撮影は避けたのでハレーションにより果房付近の情報が欠落することはなかった。果粒の色変化は鮮やかな緑色から段々とまだらに赤みがかかり,全体が明るい赤色になった後,深い紫色になっていった。この変化はL*a*b*色空間では,明るさを表すL*値と黄色成分を表すb*値の正の値が日付とともに減少し,a*値は緑色成分を表す負の値から赤色成分を表す正の値になったと表現する。色彩色差計の計測結果からも,この変化を数値化することができた。Fig. 2にL*値の経時変化を示す。
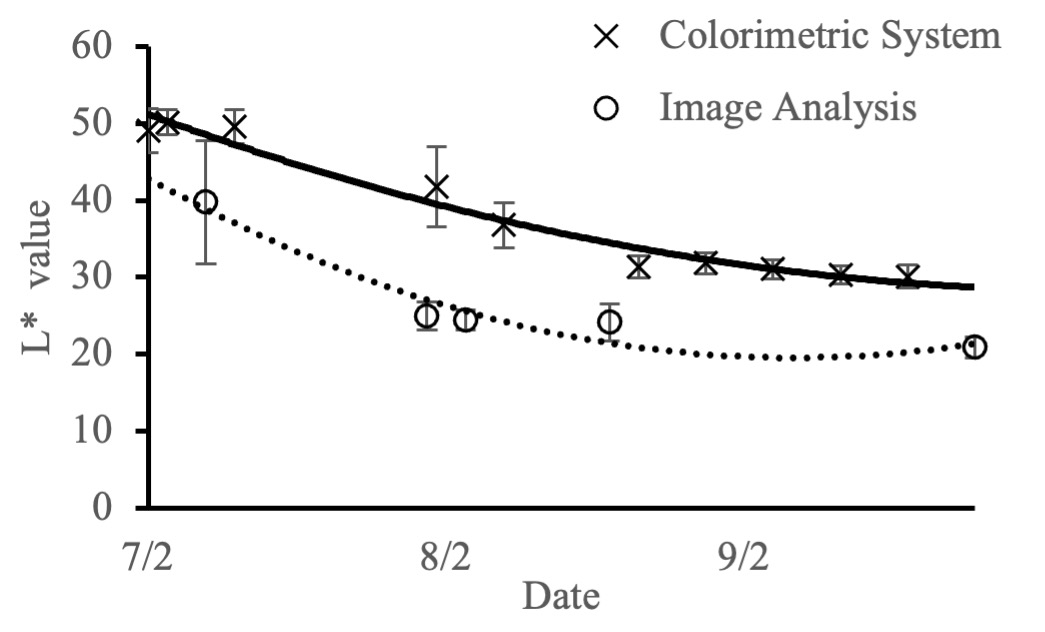
Fig. 2 L* value in colorimetric system and image analysis
図中実線が色彩色差計の結果で,7月の初めに50程度であった値が9月下旬にはほぼ30になった。パノラマ画像から取得した果房の色情報をL*a*b*値に変換する前に,ドローンのカメラの校正を行った。いくつかの色見本を,色彩色差計とドローンのカメラで撮影を行い,L*a*b*値それぞれの差異を補正する校正式を実験的に求めた。また,果房中のどこに注目すべきかについては,全体の平均値を取るべきであることがこれまでに明らかになっているので,果房全体の画素のRGB値を平均して用いた。算出結果を図中破線で示す。値としては10程度低くなったが,期間を通じて徐々に明度が低くなっていく様子を,色彩色差計同様捉えることができていた。このときの相関係数は0.97であった。またb*値でも同様に値に開きはあるものの,変化の様子を捉えることができた(Fig. 3)。相関係数は0.99であった。
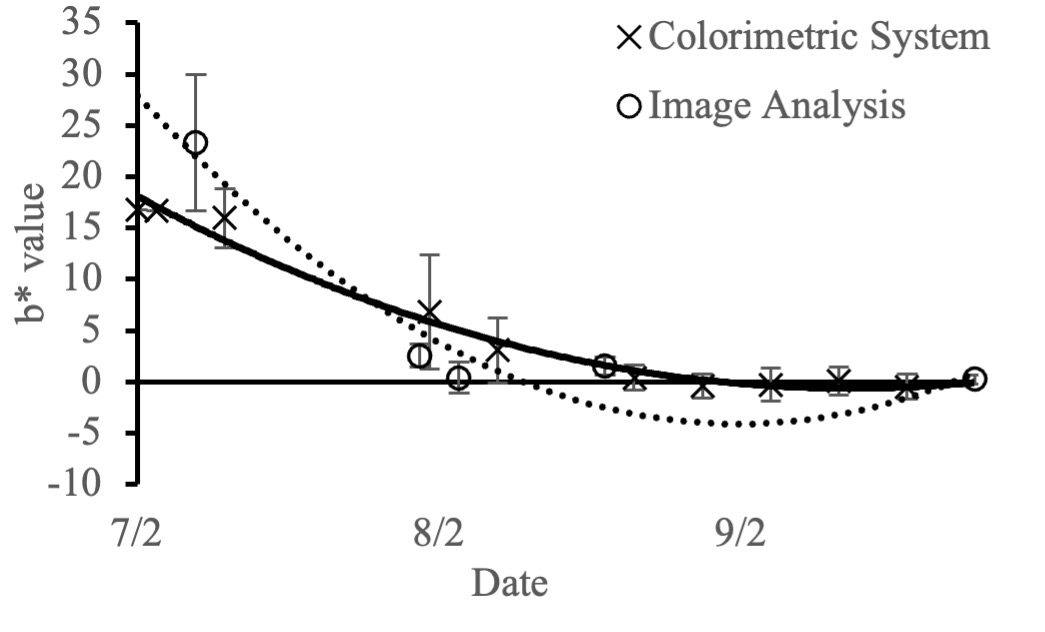
Fig. 3 b* value in colorimetric system and image analysis
以上から,ドローンでの撮影時には,それほど配慮をしなくても屋外の厳しい撮影条件下で樹上における着色程度の計測が可能と考えられた