画像認識AIによるブドウ‘オーロラブラック’の果房生長状態の識別
Identification of Grape Bunch Growth Stages in 'Aurora Black' Using Image Recognition AI
徐正陽
1. はじめに
ブドウは主枝を長く誘導して多くの果実を栽培するため生長管理が難しい。本研究室では,‘オーロラブラック’の定点観測から生長の差違を明らかにしてきた。この定点観測は定期的に一粒を収穫して計測するため正確である反面,同じ果実の連続計測はできず,また手間がかかるため多くの果実を処理することができなかった。そこで本研究では,非破壊非接触で広範囲の果実計測を目的とし,樹全体を動画で撮影して,房の色情報から生長状態識別を検討した。
2. 装置および方法
岡山大学農学部附属山陽圏フィールド科学センターのガラスハウスで栽培されている樹齢12年の‘オーロラブラック’2本の樹を観測対象とした。それぞれ主枝が6本で構成されている。撮影はスマートフォン(iPhone 14 Pro)の標準カメラを使用し,日中自然光の中で行った。枝の下を高さ約1.2 mで人が歩く速さで水平方向に移動しながら毎週樹全体を撮影し,動画から毎秒3枚の静止画を生成した。撮影は2024年3月から9月にかけて毎週行った。今回は果実単位ではなく果房全体を識別することとし,画像認識プログラム(YOLO v8)に果房の画像と位置情報を学習させた。学習用果房は118房であり,熟度に応じて全体が緑色,緑色と紫色の混成,紫色の3段階としてデータセットを作成した。学習は中央の主枝で行い,他の枝で検証を行った。生長状態としての色情報を得るため,YOLOが検出した矩形の中心部分(縦横ともに1/2の範囲)を対象とし,その領域の平均RGB値をOpenCVにより取得し,L*a*b*色空間に変換した。この数値を果房ごとに毎週記録し,そのばらつきや変化を追跡した。
3. 結果および考察
適合率94.4 %,再現率97.0 %と,高精度な検出器を作成できた。毎秒3枚の静止画により,最低5回以上各果房を異なる角度から撮影した画像を用いたことで精度が向上した。撮影した動画の各フレームを逐一確認し,すべての果房を正確に検出できているかを検証した。その結果,果房によっては認識できないフレームや領域が小さく検出されることもあったが,全く認識できない果房は無かった。今回逆光になるような撮影条件であったため,木漏れ日がフレームに入ってくると認識が難しくなった。一方,よく葉が覆い茂っていたので,その果実が認識できなくなるほど木漏れ日が続くことは無かった。このように常に光条件が変動する環境下であったが,果房の認識は良好に行うことができた(Fig. 1)。
色情報としてL*値(明度)を用いた計測結果の例をFig. 2に示す。西の枝の異なる7月2日の結果で,横軸の数値は果房のIDで数字が大きくなるほど南に位置している。良く管理されている樹なので,生長差は少ないがそれでも枝上の位置によって異なる傾向が読み取れる。まだ緑色の状態であるが,明度などの色情報には差が現れていた。明度は熟すほど値が小さくなることが確かめられている。差の原因は今後の検討課題であるが,同時に行った枝あたり6箇所で一粒ずつサンプリングしての定点観測の結果と概ね一致した。最後に2週間後の7月16日の結果をFig. 3に示す。位置による傾向は同様で全体的に明度が若干低くなった様子を観察できた。このことから,個々の果房の生長状態を識別し,経時変化を記録できたと言える。ただし,今回果実の位置情報は目視で確認してIDを付与しており,これをプログラム化することが当面の課題である。
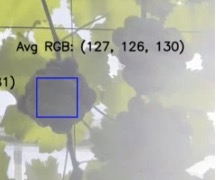
(a) Failed by backlight
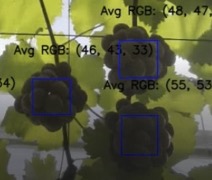
(b) Recognized by movement
Fig. 1 Example of a fruit cluster becoming clearly recognizable in subsequent frames after camera movement
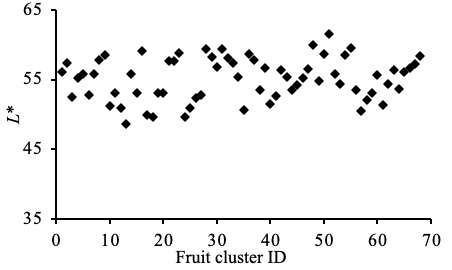
Fig. 2 L* for each fruit cluster on 2nd July
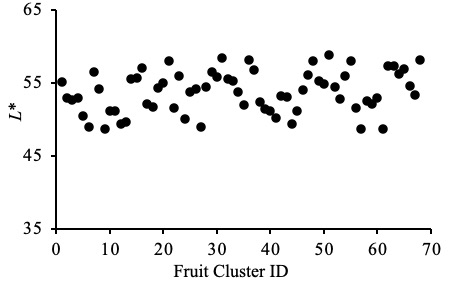
Fig. 3 L* for each fruit cluster on 16th July