農業ロボットの安全システムに関する研究
—危険度関数に基づく安全性と作業効率の評価—
為国のどか
1. はじめに
本研究では,安全かつ作業効率のよい人間協調型農業ロボットシステムの開発を最終目標とし,複数の危険度関数を用いたロボットアーム(以下,アーム)の制御によって安全性と作業効率を評価した。
2. 危険度関数
ロボットを制御する指標として,人間の位置やアームの可動範囲をパラメータに含む危険度関数Dを式(1)で定義した。

L1およびL2はアームの先端と人間の頭部および手先との距離,kは係数,iは人間の識別番号,αとβはそれぞれアームが任意の作業中に動く領域(作業領域)と構造上動くことのできる領域(作動領域)に関する係数である。危険度関数としては,まず各人の危険度をそれぞれ算出し,それらの①最大値,②合計値,③平均値,④重み付け(距離),⑤重み付け(危険度)を求めて5種類の関数を複数人用として再定義した。これらの関数を用いて制御したアーム先端の移動距離から作業効率Eと安全性Sを上限値10で算出した。今回の実験では人間の数は2人(i = a,b)とした。
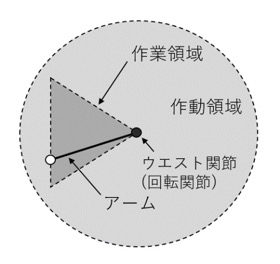
図1 作業領域と作動領域(平面図)
3. 実験方法
アーム先端が0.1 m/sの等速直線運動で往復する動きを設定し,危険度が25を超えると減速し,100を超えると停止させた。あらかじめ外界センサで人間の数種類の動きを収集しておき,同一の動きを再現して危険度関数の比較を行った。外界センサによる人間の計測およびアームの制御には0.1~0.2 s程度を要するが,その間にも人間がロボットに接近する可能性があるので,人間の現在の移動速度を直近約0.5 sの平均値を用いて予測し,L1とL 2に反映した。
4. 実験結果および考察
図2に人間の複数の動作に対して各危険度関数を用いて算出した安全性Sと作業効率Eの結果を示す。全体的にSとEにはトレードオフの関係が見られた。さらに,2人の危険度の平均値を用いた危険度関数③と大きい方の危険度を用いた①はは相対的に作業効率重視,②および④,⑤は安全性重視の傾向が見られた。コンピュータシミュレーションによる結果も同様の傾向であった。また,人間の位置予測も,良好に行われた。今後は,ロボットが稼働する環境や対象とする作業に応じた危険度関数の設定が望まれる。
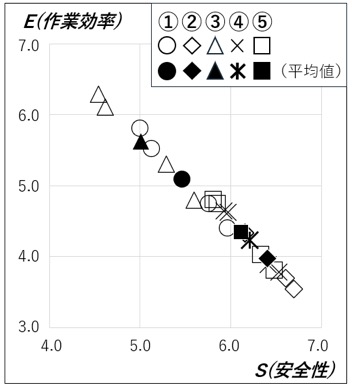
図2 実験結果例