 Fig.1 Movements of workers and robot arm 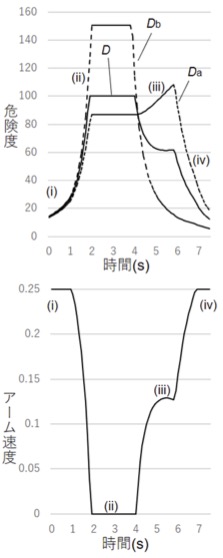 Fig.2 Simulation results with danger function ② Table 1 Comparison of safety and work efficiency calculated from each danger function 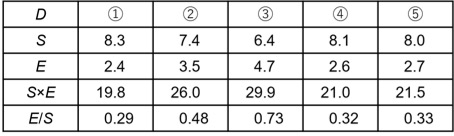 |

|
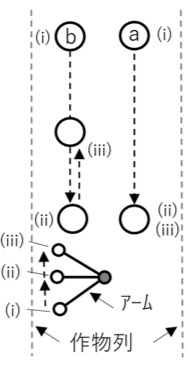
Fig.1 Movements of workers and robot arm Fig.2 Simulation results with danger function ② Table 1 Comparison of safety and work efficiency calculated from each danger function |