農業ロボットの安全システムに関する研究
─ 危険度関数の検討─
Research on Safety Systems of Agricultural Robots
─ Robot Arm Control Based on Degree of Danger ─
為国のどか
1. はじめに
本研究は,安全かつ作業効率の良い人間協調型農業ロボットシステムの開発を最終目標としている。本稿では,ロボット制御のために3種類の危険度関数を定義し,コンピュータシミュレーションによって作業効率も含めた比較検討を行った。
2. 危険度関数
危険性の程度に応じたロボット制御を実現するための手段として,危険度関数D(式(1))を定義した。
(1)
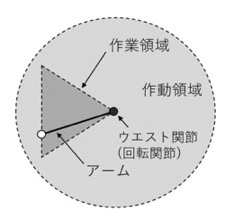
ここで,L1,L2はロボットアーム先端部分と人間の頭部および近い方の手先との距離,kは係数である。ロボットアーム(以下,アーム)の先端には,鋭利な部品を有するハンドが装着される場合が多い。また,人間の頭部は最も保護されるべき部位であり,手先は可動範囲が大きいため,これらのパラメータを関数に取り入れた。αは任意の作業中にアームが移動する範囲(作業領域),βは構造上移動可能な範囲(作動領域)に基づく変数である。ウエスト関節が回転するロボットの,領域の例をFig. 1に示す。この領域内では人間と接触する可能性があるので,領域内に人間の代表点(頭部)が侵入するとアームを停止させることとした。また,頭部がこれらの領域外にあっても,手先が侵入する状況も考えて,領域の周囲1 mから徐々に危険度を上昇させることとした。
3. 実験方法
大規模トマト生産施設での作業を想定し,アーム先端が作物列に沿って0.5 mの幅を0.25 m/sで等速直線移動する動作を想定した。シミュレーションにおいては,パラメータLを含む項のみを用いた危険度関数Ⅰ,それにαを加えたⅡ,さらにβを加えたⅢの3種類を設定し,アームの制御結果を比較した。危険度が100を超えればアームを停止させ,25から100の範囲では減速させることとした。3種類の危険度関数を比較するために,同じ人間の動きを再現した。評価指標として,危険度関数Ⅰ〜Ⅲのいずれかが減速した時点から初期速度に戻るまでの,単位時間あたりの危険度を算出した。また,同一時間内における作業効率(各制御におけるアーム先端の移動距離/一定速度で作業を継続した場合のアーム先端の移動距離)も算出した。
4. 実験結果および考察
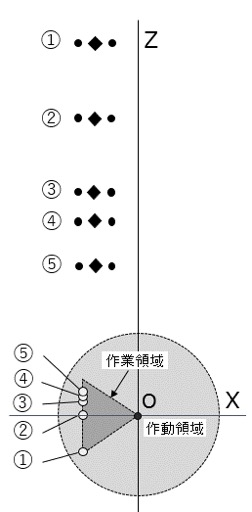
人間が1.0 m/sの速度で移動(①→⑤)し,ロボットの隣の果房に対して立ち止まって作業を行う状況を想定したシミュレーション結果(代表的な点のみをプロット)の一例をFig. 2(アームの位置は危険度関数Ⅰの場合)とTable 1に示す。◆が人間の頭,●が手先であり,○はアーム先端をそれぞれ表している。人間の接近に伴い,②ではL1,L2の値が小さくなったため,いずれの危険度関数においても25を超え,その結果,アームは減速を開始した。さらに④からは,ⅡおよびⅢにαやβの値が加算されたため,アームの速度はⅠに比べ小さな値となった。⑤では全ての関数において危険度が100を超えたので,アームが停止した。実験の結果,危険度関数の設定に応じたアームの制御が可能であることが示唆された。またⅠ,Ⅱ,Ⅲの順で安全性を確保するために,ロボットが停止した時間はより長くなった。安全性とトレードオフの関係にある作業効率は,危険度関数Ⅰ (0.304),Ⅱ (0.297),Ⅲ (0.28)の順に小さくなった。今後は,様々な人間の動きや,走行部による移動も含めたロボット作業に関して検証していきたい。
謝辞
本研究はJSPS科研費19K06317の支援を得た
Fig.1 Working and operational spaces of robot arm
Fig. 2 Example of robot control
Table 1 Movements of human and robot arm