農業ロボットの安全システムに関する研究
─危険度に基づくロボットアームの制御─
Research on Safety Systems of Agricultural Robots
─ Robot Arm Control Based on Degree of Danger ─
塩釜愛
1. はじめに
農業ロボットの対象は不規則でばらつきも多く,自らが移動しながら目的の作業を行う場合が多い。また,農作業の複雑さから,ロボットだけによる農業の完全自動化はまだ困難であり,人間とロボットが同一空間内で作業を行う状況が想定されるため,安全システムが不可欠である。一方,生産性の面からは作業効率も重要な要因である。そこで本研究では,安全かつ作業効率の良い人間協調型農業ロボットの開発を最終目的とし,3次元距離センサ(以下,外界センサ)からの情報を基にロボットアーム(以下,アーム)の制御を行った。
2. 危険度関数
ロボットを制御するための指標として,人間の位置やアームの可動範囲をパラメータに含む危険度関数Dを定義し,その値に応じてアームの速度を制御した。
(1)
L_1およびL_2は,ロボットハンドが装着されるアーム先端部分と人間の頭部および近い方の手先との距離,k_1,k_2は係数である。α,βはそれぞれアームが任意の作業中に動く領域(作業領域)と構造上動くことのできる領域(作動領域)に関する係数であり,いずれの領域も危険性があるので,人間が近づくと危険度が上昇することとした。また,外界センサによる人間の計測時間には0.2秒程度を要する。その間にも人間がロボットに接近する場合があると考え,直近約1秒の人間の速度の平均値を用いて移動位置を予測し,L_1に反映した(位置補正)。さらにアームの制御実験では,パラメータLを含む項のみを用いた危険度関数Ⅰ,それにαを加えたⅡ,さらにβを加えたⅢの3種類を比較した。 危険度関数Ⅰ~Ⅲにおける制御において,いずれかの関数によりアームが減速を開始した時点からすべてのアームが初期速度に戻るまでを計測時間とし,作業効率(各制御におけるアーム先端の移動距離/一定速度で作業を継続した場合のアーム先端の移動距離)と,安全性の指標として単位時間当たりの危険度D/s(作業効率と同一時間内での危険度の合計値/計測時間)を求めた。
3. 実験装置と方法
実験は大規模トマト生産施設内での作業を想定して行った。外界センサに3次元距離センサAzure Kinect(マイクロソフト社製),ロボットには6自由度垂直多関節アーム(三菱電機社製)を使用した。3種類の危険度関数を比較するため,人間がロボットに接近する動作は予め外界センサで取得しておき,位置補正をした同一の移動データを用いてアームを制御した。収穫動作を想定して,ロボットはウエスト関節から35 cm離れた直線上50 cmを作物列に沿ってアーム先端が等速運動を繰り返すこととし,危険度が25を超えると,その値に応じてアームを減速し,100を超えると停止させた。
4. 実験結果と考察
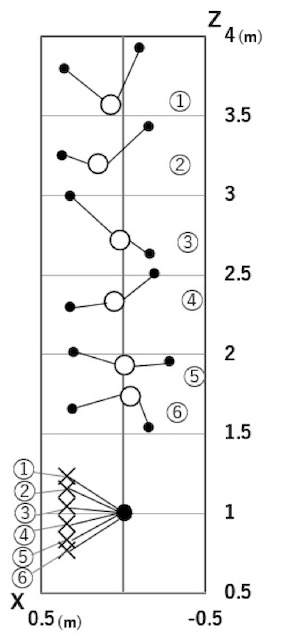
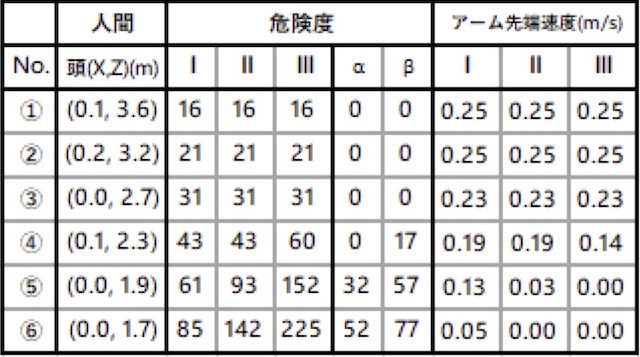
実験結果の一例をFig. 1に示す。この例は,0.25 m/sの等速度で作業を行っているロボットに人間がコンテナを回収するために接近(①→⑥)した後に停止し,手を前に伸ばした状況を想定した動作である。いずれの危険度関数の場合においても,その値が25を超えるとアームが減速を開始した。危険度関数Ⅱ,Ⅲにおいては⑤からαの値が加算され,さらにⅢでは④からβが加算されたため危険度の値が上昇し,減速および停止となった。危険度関数ⅠからⅢの順に危険度が大きくなるに従い,安全を確保するためにロボットアームの減速,停止時間が長くなった。安全性の指標D/sはⅠ(540),Ⅱ(638),Ⅲ(856)の順に大きくなり,一方作業効率はⅠ(0.46),Ⅱ(0.44),Ⅲ(0.39)の順に小さくなった。実験の結果,人間の動きに応じたロボット制御が可能であることが確認され,トレードオフの関係にある安全性と作業効率を定量的に表すことができた。今後は他のロボットや複数の作業者に対しても検証する。
謝辞
本研究はJSPS科研費19K06317の支援を得た
Fig.1 Example of robot control
Table 1 Movements of human and robot arm