YOLOv3の物体検出を用いた促成栽培イチゴ果実の生長計測
Growth Measurement of Forcing Culture Strawberry using Object Detection of YOLOv3
勝部史也
1. はじめに
イチゴの促成栽培の現場では,植物体の生長を的確に把握することが求められているが,定量的かつ継続的に計測する方法ななく,生産者の目視で感覚的に行われているのが現状である。また,大きな施設で日々全ての植物体を観察することも容易ではない。そこで本研究では,ドローンで空撮しながらの自動計測を目指して,動画から物体検出AIにより促成栽培イチゴの果実を検出し,生長情報として果実の肥大を計測した。
2. 実験装置および方法
イチゴの品種は「とちおとめ」で,ハウス内で高設栽培された42株を対象に,ドローンを水平に飛行させ,登載された小型カメラで通路側から果実が画面中央に位置するように動画を1週間に2回,自然光下で撮影した。物体検出AIにはYOLOv3(Redmon and Farhadi, 2018)を用い,ランダムに果房周辺画像650枚を取りだして,果実約2,800個を矩形領域で指定し,各果実を赤みの無い「青色」,赤みが少しでもある「未熟」,収穫適期の「収穫」の3カテゴリーに分類し,学習を行った。この物体検出AIの検出精度を評価するために,各カテゴリーについて誤検出の少なさを示す適合率と見逃しの少なさを示す再現率,適合率と再現率の調和平均であるF値を求めた。また,YOLOv3は物体検出も矩形領域で行うので,この面積を果実の大きさと仮定し,その変化を果実肥大として計測した。果実の検出は第二腋花房のものを,2021年1月15日から3月1日まで行った。検出の検証を容易にするために,動画から各撮影日の静止画を株ごとに取り出してから,計測を行った。果実ごとに追跡できるよう各撮影日で対応付けを行い,花から果実になって検出が開始されてから,収穫に至るまでの果実肥大の推移を記録した。
3. 実験結果および考察
いずれのカテゴリーでもF値が0.8を超えたことから,8割以上の対象を誤分類や誤検出することなく検出できた。適合率は「未熟」が0.81と,他2つのカテゴリーと比較すると低く,これは「収穫」の果実を「未熟」として検出したことが理由として考えられる。検出に成功したものについて,時系列での対応付けを行い,追跡を行った。
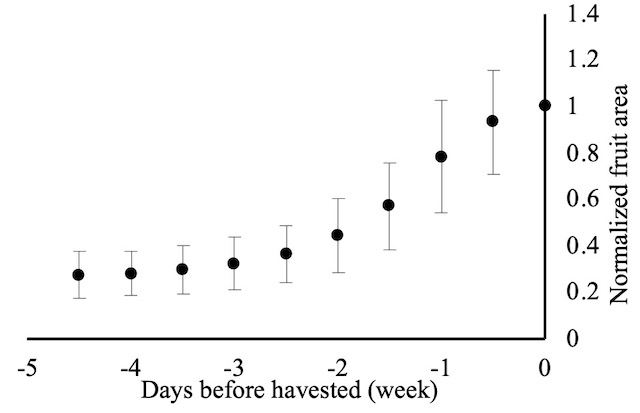
まず,標準的な果実肥大の様子を知るために,全ての果実面積を平均した。その際,果実の面積はそれぞれ異なることから,収穫日の果実面積を1,収穫日を0日として正規化した(図1)。果実肥大は当初はゆっくり進み,収穫2週間前から速度が急に上がり,収穫直前にまたゆっくりになった。2月頃のイチゴ果実肥大は1つのシグモイド曲線で近似できることが知られており,そのことを計測できたと考えられる。今回の観測では,この果実肥大は株ごとや果実ごとでも異なっており,その原因にアプローチするための貴重な情報を得られたと考えられた。
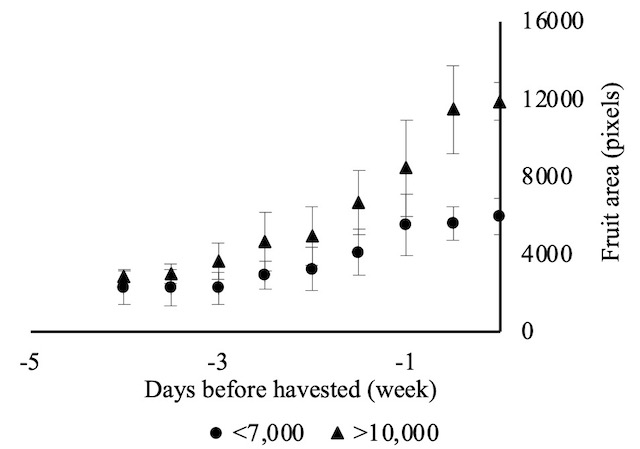
この情報を用いて,果実の大きさ別に果実肥大を比較した結果を図2に示す。計測開始直後の差は2割ほどであったが,10,000ピクセル以上の大きな果実では,収穫2週間前から大きく肥大し,7,000ピクセル以下の小さな果実の2倍になった。今後さらにこのような差を数値化していきたい。
Fig.1 Normalized fruit area
Fig.2 Fruit obesity by size