農業ロボットの安全システムに関する研究
─ロボット制御シミュレーションによる危険度の検討─
Research on safety systems of agricultural robots
―Examination of degree of danger by robot control simulation―
塩釜愛
1. はじめに
農業ロボットは,床に固定されて作業を行うような産業用ロボットとは異なり,自らが移動しながら作業をする場合が多い。また,人間がロボットの近くで作業を行う状況もあるため,その安全性が重要となる。一方,生産性の面からは,作業効率も無視できない。本研究は,危険性の程度に応じてロボットが動作を決定するロボットシステムの開発を最終目的とし,危険度関数を定義して,3次元距離センサとロボット制御シミュレーションによる安全システムの検討を行った。
2. 危険度関数
危険性の程度に応じてロボットロボットを制御するために,速度や距離に関わる危険性のパラメータを含む危険度関数を以下のように定義した。
(1)
D
は危険度,
v
は人間の頭部とロボットハンド(以後,ハンド)の相対速度,
L
1
は人間の頭部とハンドの3次元距離,
L
2は人間の手先とハンドの3次元距離,
k
1
,
k
2
,
k
3
は係数である。ロボットアーム(以後,アーム)と人間の相対速度が大きいほど,接触した場合のダメージが大きく,両者の距離が近いほど接触する可能性が高くなる。また,ハンドはアームの先端に取り付けられ,鋭利な部品を有している場合が多い。そこで,危険度の算出には,ハンドと人間との相対速度と距離を用いた。また,人間の代表点として,目や脳といった重要な器官を多く含む頭部と,体から最も離れロボットに触れる可能性の高い手先の位置をパラメータに含めた。
3. 実験装置と方法
3次元距離センサKinect v2(マイクロソフト社製)で実際の人間の動きを検出し,コンピュータ上で作業を行うロボットとの危険度を算出した。今回は,大規模トマト栽培施設内の収穫ロボットを対象とし,人間がロボットの近くで作業を行う状況を想定した。ハンドは高さ1.5 mで,回転中心から1 m離れた直線上(作物列を想定)を60 °の範囲で等速運動を繰り返すこととし,危険度の大きさに応じて減速や停止などの制御を行った。
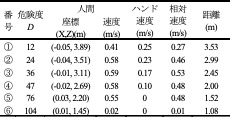
4. 実験結果と考察
実験結果の一例をFig. 1とTable 1に示す。この例では,人間がロボットに接近したあとに,立ち止まって作業をする状況を想定した。図中と表中の番号が各瞬間の両者の位置を表し,0.5 m間隔で人間の頭部とハンドが接近する様子をプロットした。危険度に応じたハンドの制御速度をFig. 1に記す。ハンドは初期速度0.25 m/sで①から作業を開始したが,両者の接近に伴って②で危険度が20を超えたため減速を開始し,両者の距離が近くなるほど急激に危険度が上昇して⑤では危険度が70を超えたためハンドは停止した。また,人間が停止した状態で手先をロボットの方に伸ばした実験においても良好に手先が検出され,その動きに応じてロボットの制御が行われた。
今回の実験では,危険度の値に応じたロボット制御を単純な動作のシミュレーションによって検討したが,今後は温室においてロボットを用い,実際の作業に近い環境を再現して本ロボットシステムの有効性を確認する。
Speed of the robot hand
〇 0.25 m/s (D ≦ 20)
△ 0.35-0.005D m/s (20 < D ≦ 70)
× 0 m/s (D > 70)
Fig. 1 Example of robot control
Table 1 Movements of human and robot hand