 Distance data |
 Extraction of human body region |
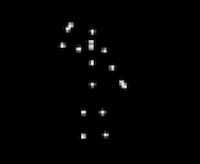 Detection of joints and parts Fig.1 Example of human body detection |
 Fig.2 Result of detection of straight approach |
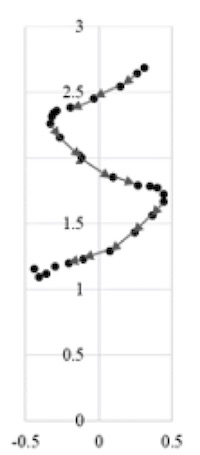 Fig.3 Result of detection of zigzag approach |
Distance data |
Extraction of human body region |
Detection of joints and parts Fig.1 Example of human body detection |
Fig.2 Result of detection of straight approach |
Fig.3 Result of detection of zigzag approach |