2. 実験装置およびアルゴリズム
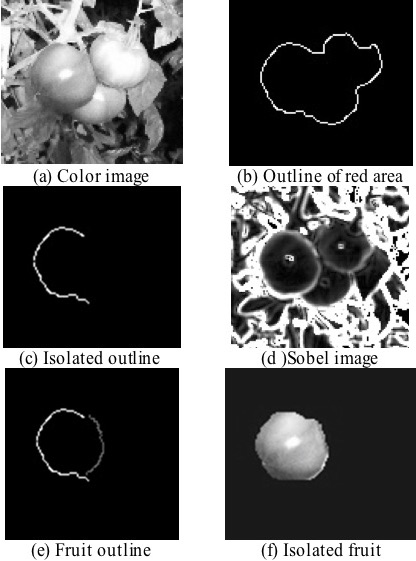
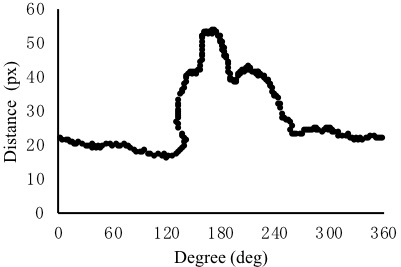
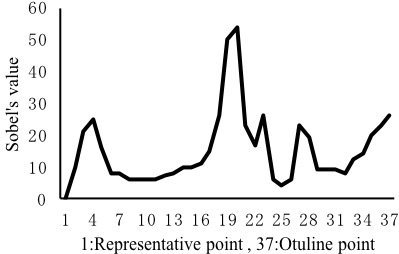
RGBカラーカメラおよび3次元距離センサを内蔵したMicrosoft社製Kinect for Windows v2を用いた.本学部附属山陽圏フィールド科学センターの温室内で栽培されたトマトの作物列に対して,0.6 m付近の距離から夜間に撮影を行った.Fig.1に果実の分離アルゴリズムを示す.まず,カラー画像(Fig.1(a))と3次元距離情報(以下,距離画像)を取得し,カラー画像内の収穫対象となる果実の赤色領域を抽出する.その輪郭線を求め(Fig.1(b)),領域内において最も距離の小さい点を代表点(×印)とする.つぎに代表点から輪郭線までの距離を,代表点の水平左を0度として時計回りに求める(Fig.2).この例では,0から約120度,約240から360度は左側果実の輪郭線を走査している.果実が重なっている部分は代表点からの距離が大きくなり,その変位も大きいので,対象果実と分離できる(Fig.1(c)).ここで,隣接した果実との境界を求めるために,画像処理に用いられるSobelフィルタを距離画像に適応した(Fig.1(d)).このフィルタにより距離の変化が大きい所が強調され,その値は代表点から右下に引いた図中の破線を例にとると,Fig.3に示ように1が代表点で,境界付近の19でピークを得る.このピークを境界点と定義し,同様の処理を繰り返して境界点を連結すれば,果実間の境界線を得ることができる(Fig.1(e)).この境界線を用いてFig.1(a)の果実を分離した結果がFig.1(f)である.最終的にこの果実が茎葉等に隠されておらず収穫可能かどうかの判断は円形度等の特徴量を利用すれば可能である.