 |  | 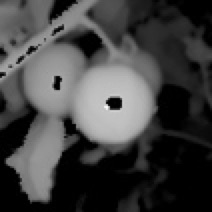 |
| (a) Color image | (b) Ripeness color area | (c) Depth image |
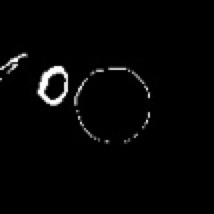 |  | 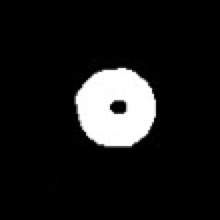 |
| (d) Point group | (e) Connecting components | (f) Identified fruit |
| Fig. 1 Example of fruit identification | ||
秘蔵ムービー
| | |
| (a) Color image | (b) Ripeness color area | (c) Depth image |
| | |
| (d) Point group | (e) Connecting components | (f) Identified fruit |
| Fig. 1 Example of fruit identification | ||