大規模トマト生産施設における収穫ロボットの開発
─ ガクを離脱させない収穫用エンドエフェクタの試作 ─
Development of Tomato Harvesting Robot in Large Scale Greenhouse
― End-Effector with Fingers and Band to Hold Calyx ―
陣内瞭輔
1. はじめに
これまで本研究室では,トマト果実を離層から分離して収穫を行うロボットの研究を行ってきた.ガクを離脱させない機構として,上下からバンドでガクを把持するエンドエフェクタも開発され,ほぼ良好に収穫を行えた.しかし,他の果実が隣接した場合,バンドがガクに到達できないことがあった.そこで,本研究では下側のバンドをフィンガにすることで,果実へのアプローチを容易にし,確実に把持することを目的としたエンドエフェクタを試作した.
2. 実験装置および方法
(1) 試作したエンドエフェクタ
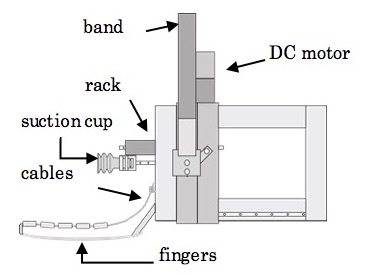
Fig. 1に試作したエンドエフェクタの概略図を示す.エンドエフェクタは前後方向に15 mmスライドする吸着パッドと,その動きに連動してガクを押さえるバンド,および果実を把持する2本のフィンガから構成されている.下側をフィンガとしたのは,他の果実が隣接していても手前にある対象果実の下側には空間があり,進入が容易であるためである.加えて,より果実への接触面積を増やすことで,安定して把持する効果も期待できる.このフィンガは,連結されたケーブルを引くと湾曲して果実を把持する.バンドは果柄に接触するまで閉じた後,後方にスライドしてガクに密着する.
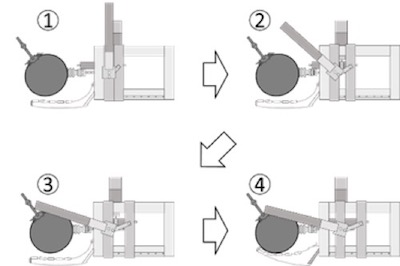
Fig. 2にバンドをガクに密着させるまでの動作を示す.エンドエフェクタの動作はラック,ピニオンを介した1つのDCモータで行われており,吸着パッドやフィンガの動作と連動する.まず,①真空ポンプに接続された吸着パッドを最も前進させた状態で,目的の果実に接近して吸着する.②ラックが後退し始めると,吸着パッドも後退し,果実を果房から分離しながらバンドを閉じ始める.③吸着パッドは15 mm後退すると止まるが,ラックは後退し続け,バンドは果柄の位置まで閉じる.その後,④ラックが最大15 mm後退し,バンドがガクを押さえると同時にフィンガで果実を把持する.
(2) 収穫実験
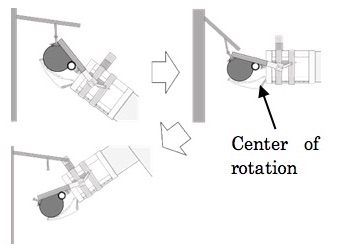
岡山大学農学部附属山陽圏フィールド科学センターの温室内で栽培されたトマト(品種名:桃太郎)を実験室に移動させ,収穫実験を行った.試作したエンドエフェクタは5自由度垂直多関節アームに装着した.収穫動作はまず,対象果実の斜め下方向から接近して,フィンガを果実の下から進入させる.つぎに,エンドエフェクタの把持動作後,人が手でもぎ取るときの動作を模して,果実を回転させる.このとき,バンドを支点にしながらより大きな力を離層にかけ続けられるよう,吸着パッドの先端を回転中心(Fig. 3の○印)とした.なお,今回の実験では視覚部は用いていないので,果実の座標は入力して,収穫動作を行った.
3. 実験結果
下側をフィンガとしたことで,果実を把持することができた.また,バンドをスライドさせることにより,ガクに密着させることができた.これら機構と制御により,他の果実が隣接した場合でも対象果実のガクを離脱させずに収穫できる可能性が確認された.
Fig. 1 End-effector with fingers and band
Fig. 2 Calyx holding motion
Fig. 3 Harvesting motion of robot arm
秘蔵ムービー