高齢・障がい者のための農作業の軽労化技術の開発
- 知的障がい者を対象とした耕うん機の改良 -
Development of Labor-saving Farming Technologies for Aged and Handicapped People
― Improvement of the Tiller for Intellectual Disabled People ―
綾野宏紀
1. はじめに
近年,農業分野でも障がい者の雇用が推進されており,農地条件や農作業環境において,障がい者が働き易い環境づくりの支援が求められている.農作業は,自然の中での作業であることから,福祉施設利用者のリハビリテーションの手段として行われている場合も多い.しかし,現状の農地や農業機械は生産性向上に特化しており,農業経験のある高齢者でも難しい作業が多く,このことは障がい者の農業参入を困難にしている.そこで,農地の農作業環境や,農業機械の操作性の改善を行うことで,障がい者が農業へ参入しやすくなるのではないかと考えた.また,最近では障がい者の中でも,知的障がい者が労働者として雇用される割合が最も増加しており,事務的作業や生産工程従事など,様々な場面で我が国の人手不足を補っている.
知的障がい者の方々の多くは,知的能力,適応力,コミュニケーション能力に問題を抱えている.一方,障害の程度に個人差はあるが,単純作業の繰り返しを得意としていることが多い.反面,その場の状況によって臨機応変な対応を要求される,農業のような複雑な作業を苦手としている.そこで本研究では,知的障がい者と小型耕うん機を対象として,使いやすい農業機械の開発を目的に,耕うん機を改造してその操作性の評価を行った.
2. 耕うん機および現地調査
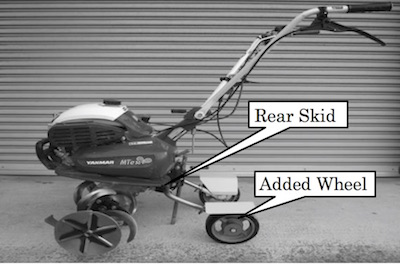
今回対象とした小型耕うん機は,軽量で,ハンドルのアクセルレバーを握ると前進し,離せば止まるため,比較的操作が単純で容易であると考えられる.耕深の調節も,ハンドルの上下で簡単に行う事ができる.ハンドルを下げれば,耕うん爪の後方に取り付けられた抵抗棒が土壌に深く入り,耕深が深くなり,逆にハンドルを上げれば浅くなる.しかし,この操作は臨機応変な対応が苦手な知的障がい者にとっては,難しいものとなってしまう.土壌の状態によってハンドルが大きく上下したり,予測しない動きをしたり,加えて機体は振動が激しく安定しないためである.現地調査においても,耕深が深くなりすぎて耕うん機が前進できない場合や,逆に耕うん爪が土壌の表面を回転して耕うんできていない状況も多く見られた.そこで本研究では,抵抗棒の後方に車輪を追加し,耕うん作業時の操作性,安定性について検討を行った(Fig. 1).
3. 実験方法および結果・考察
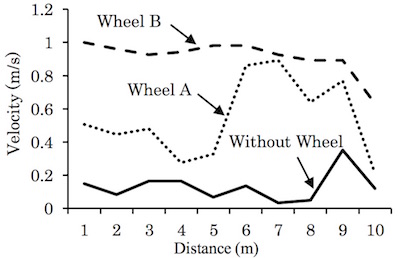
障がい者支援施設において知的障がい者6人を対象とし,車輪なし(現行機)と2種類の車輪(A:質量340 g × 2輪,B:2260 g × 2輪)を装着した改良機で作業(設定耕うん速度:1 m/s)を行った.作業速度の一例をFig. 2に示す.車輪のない現行機では耕深が深くなりすぎて耕うん爪が土中で空転する状況が多数見られた.車輪Aでは現行機と比べ,適度な耕深の作業が増え,作業速度も高くなった.車輪Bにおいては耕深が深くなりすぎることもなく,設定した車速に近い速度で安定した作業が実現できた.その理由としては,車輪Aに比べBは質量が大きいため,重心が機体の後方に移動し,車輪が土壌表面をより大きな力で押しつけることになる.このことで,車輪は土壌表面に沿って前進するので抵抗棒の貫入深さはほぼ一定となり,さらにハンドルの上下振動も抑えられるので走行が安定したと考えられた.加えて,車輪を追加したことで,作業者は耕深を調整するためのハンドルの上下移動に気をとられることなく,ハンドルを前に押しながら走行するだけで耕うんが行えることが分かった.また,車輪を付加することで旋回時も現行機と比べて安定していた.本改良機は新たな操作を必要とせずに目的の動作が実現できるため,補助が必要な障がい者にとっても操作しやすい機械といえる.
なお,本研究は農林水産省・食品産業科学技術研究推進事業25071C「高齢・障がい者など多様な主体の農業参入支援技術の開発」(平成25~27年度)により実施した.
Fig. 1 Modified tiller
Fig. 2 Example of work velocity
秘蔵ムービー