|
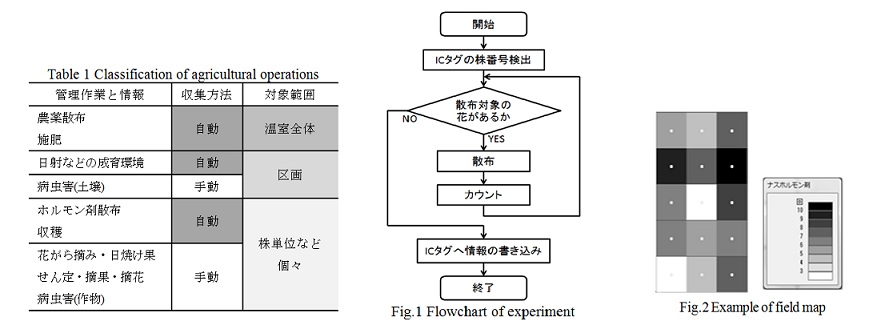
2. ナス栽培における管理作業 ナス生産に関わる管理作業と取り扱う情報を把握するため,生産者の圃場において聞き取り調査と成育状況の時間的変化を記録した。Table1に各管理作業における情報の収集方法と対象範囲を示す。情報収集に関しては,機械等にスイッチやセンサを装着すれば自動的に収集可能なものと,作業者が手動で行うものに分類し,作業の対象が個々の株に対するものか,一定の区画あるいは温室全体に及ぶものかを分類した。本研究では,各株の花を対象とし,自動で情報を収集できるホルモン剤散布に着目し,散布日時や回数をICタグに記録するシステムを検討した。散布回数を記録することで,株中の花の数や予測果実数が分かり,株の詳細な履歴構築が可能となる。 3. 実験装置および方法 本実験では,従来のRFID通信制御プログラムと,新たに作成したホルモン剤散布記録プログラムを使用した。Fig.1に1つの株に対する実験のフローチャートを示す。ホルモン剤を散布したという信号がロボットに送られると,現在通信しているICタグが対応する株への散布だとして,その回数と日時が記録される。また,ほ場管理用ソフトを用いて,各株に対して行われたホルモン剤散布に関する情報のマッピングも行った。 4. 実験結果および考察 ホルモン剤散布回数のマップの一例をFig.2に示す。各メッシュは株を示し,その色が薄いほど小さな値を示す。各株に対して,処理の回数は正確にカウントされ,ICタグとの通信も良好に行われた。作業履歴を記録することで,ほ場や株に関する一連の詳細な記録を残すことができ,収穫された果実が属していた株へ,どの様な作業をどの程度行ったのかが分かる。さらに,ICタグを用いて作業履歴をほ場内で共有することで,作業者のスキルに関わらず情報の確認ができ,人的ミスの軽減と作業効率の向上につながる。また,ホルモン剤散布回数から見込み収量を予測し,実際の収量と比較すれば,成育途中に何らかの理由で収穫まで至らなかった果実の個数が分かる。このような空間的ばらつきを観察することで,的確な作業の選択など作業者支援の可能性が広がる。 |
|
|
|