|
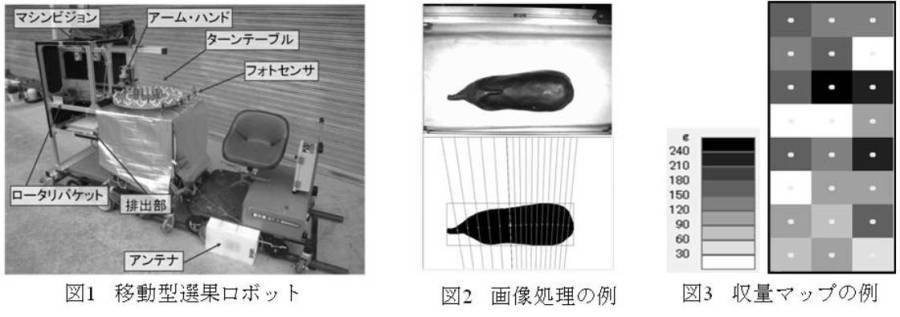
2. 実験装置および方法 移動型選果ロボットの外観を図1に示す。このロボットシステムでは,人間がロボットを移動させながら果実の収穫を行い,ロボットが品質評価と分類を行う。収穫された果実がターンテーブル上に置かれると,運転席の下に装着されたアンテナに最も近い株のICタグからIDを読み込み,果実が収穫された株を特定する。その後,果実はロータリバケットまで搬送され,品質評価が行われる。画像処理の一例を図2に示す。果実の長さや幅の他にも果実の中心線の長さ,最大果実幅,曲率,円形率,先細り率等の品質情報が得られ,株の情報と共に保存される。最終的に果実は各品質情報のしきい値により,規格品とそれ以外の2種類に分類される。ICタグの寸法は縦55mm,横85mm,厚さ1 mmであり,電源は不要である。アンテナを介したリーダ・ライタを用いて様々な情報を非接触でICタグに書き込み,読み取ることが可能である。今回の実験では,株間60 cmで8株の千両ナスを3列,農学部内のビニルハウスで栽培し,各株にICタグを取り付け実験を行った。ICタグには,各種作業を想定し,あらかじめ圃場内での位置情報や施肥,農薬散布等の作業履歴,病害虫の有無や発生履歴をロボットとは別のPCから書き込んだ。ロボットを用いた収穫作業時にこれらの情報を自動で読み取り,日付や果実本数といった収穫履歴を株情報としてICタグに書き込んだ。一方,ICタグから読み取った情報はロボットのディスプレイに表示すると同時に,農薬の散布直後で収穫が行えない場合や,必要な追肥を忘れている場合は警告のメッセージを表示した。 3. 結果および考察 ロボットで収集した収量マップの一例を図3に示す。各メッシュは株を表し,その色が薄いほど小さな値を示す。白はその日に果実が収穫されなかったことを表す。全ての株のICタグについて,収穫作業時にロボットが株情報を良好に読み取り,品質情報とリンクすることができた。また,登録された情報を基にした警告のメッセージも表示され,ロボットから新たに株情報を書き込むこともできた。このため, ICタグとの通信機能を持つ端末を携帯して作業を行えば,作業の種類や作業者に関わらず,各株の情報を圃場の中で保存,管理,共有することができる。また,移植等の作業で株の位置が変わっても以前の情報を保持し続けることができるため農産物の一貫した生産履歴を構築することが可能となる。 |
|
|
|