|
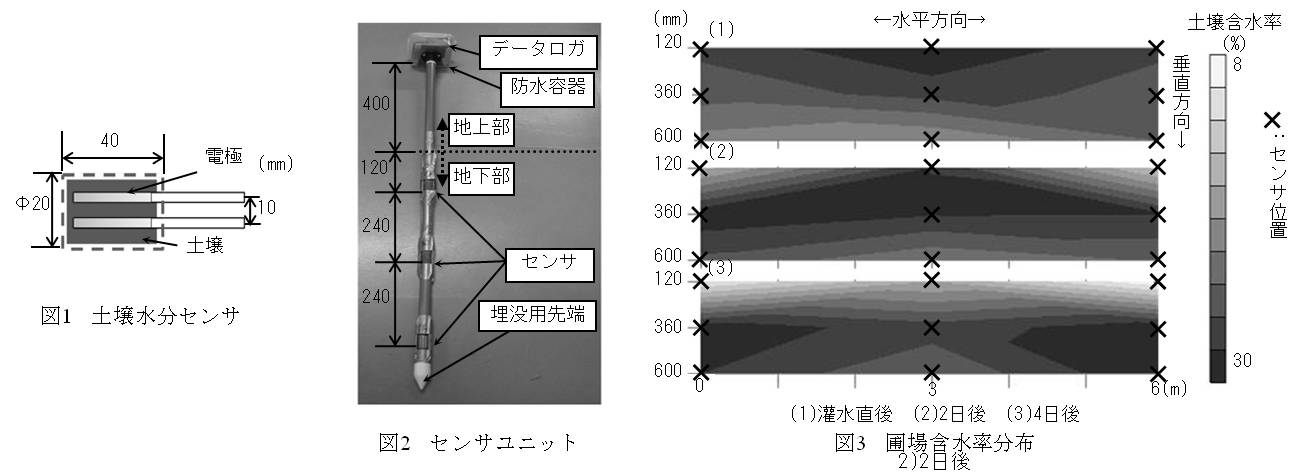
2. 実験装置および方法 土壌水分センサ(図1),データロガを塩ビパイプにより一体化させたセンサユニットを図2に示す。土壌水分センサは,電気抵抗方式を採用し,吸水体に計測対象の圃場の土壌を使って製作した。土壌含水率とセンサ出力の校正は,事前に土中で水分量を変えながら電圧値を計測して行った。データロガには無線機能付のMOTE((株)クロスボー社製)を使用した。MOTEは,子機が近くの子機を介して遠くの基地局にデータを送信する機能や,通信状態の悪化や位置の変更に対し,自分で最適な通信経路を探して修復する機能等を持つ。これらの機能により,周囲の環境の変化が大きな圃場でも安定した通信が可能で,センサユニットの移動も容易に行える。予備実験として,マイクロ波で通信するMOTEが,水分を含む植物体によって受ける通信阻害の程度を調べた。見通しの良い直線では設置高さ0,1 mでの最大通信距離は10,80 mであったが,サツマイモが約30 cmに成長した圃場では0,300,400 mmで3,4,10 mであった。この結果から,地上部はMOTEの通信距離の確保のために400 mmとし,地下部は120,360,600 mmの3深度にセンサが配置されるようにユニット化した。このセンサユニットを用いて,農学部内の圃場の畝(長さ10 m,高さ30 cm)を対象として計測を行った。各畝に3 m間隔で3本,3畝で計9本を埋設し,灌水は畝ごとに灌水チューブで行い,畝上にはマルチを張って圃場に入る水分を制限した。 3. 結果および考察 計測した圃場の水分状態を可視化した一例として,畝の深さ方向の分布図を図3に示す。灌水直後は表面付近,2日後は地下300 mm付近,4日後は地下500 mm付近の含水率が高く,水が移動する様子が見られた。このように,試作した多数のセンサユニットにより形成されるユビキタスセンシングシステムによって,圃場中の水分状態を空間的に経時計測することが可能となった。今後は長期間の計測から,作物の収穫量や品質との関連付けを行いたい。 |
|
|
|