|
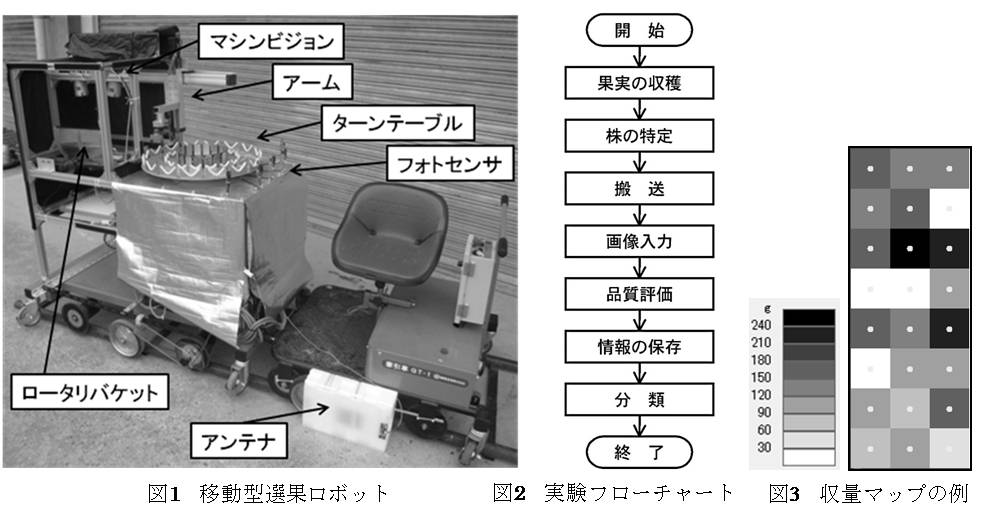
2. 実験装置および方法 移動型選果ロボットの外観を図1に,実験の流れを図2に示す。このロボットシステムでは,ビニルハウス内の作物列に沿って設置されたレール上を走行しながら,人間が果実の収穫を行い,ロボットが品質評価と分類を行う。各株にはIDが記されたICタグが取り付けられており,ロボットに搭載したアンテナを介し,リーダ・ライタによって情報の送受信が行われる。収穫された果実がターンテーブル上に置かれてフォトセンサが反応すると同時に,アンテナに最も近い株のIDを読み込み,果実が収穫された株を特定する。その後,果実はアームによってマシンビジョンの真下に設置されたロータリバケットまで搬送され,そこで2回の画像入力を経て果実長,曲率,疑似質量等のパラメータを基に品質評価が行われる。画像から得られた品質の情報は収穫した株の情報と共に保存される。最終的に果実は各パラメータのしきい値により規格外とそれ以外の2種類に分類される。ロボットによって収集したデータは精密畑作栽培管理用ソフトに構築される。今回の実験では,株間60 cmで8株の千両ナスを3列,農学部内のビニルハウスで栽培し,実験対象とした。アンテナとICタグの距離は予備実験の結果により約30 cmとした。 3. 実験結果および考察 ロボットで収集した収量マップの一例を図3に示す。各メッシュは株を表し,その色が薄いほど小さな値を示す。白はその日に果実が収穫されなかったことを表す。実験の結果,すべての株のICタグに対して良好に読み取りが行われ,複数の株を同時に認識することもなかった。図ではある1日の例を示したが,期間の累積値の表示や収穫日による比較が可能であり,施肥量や灌水量等もあらかじめ入力しておけば,各種投入資材に関するマップを作成することもできる。ICタグを播種の時点から設置しておけば,移植等の作業で株の位置が変わっても以前の情報を保持し続けることが可能になる。これにより農産物の一貫した生産履歴を構築することが可能となる。 |
|
|
|