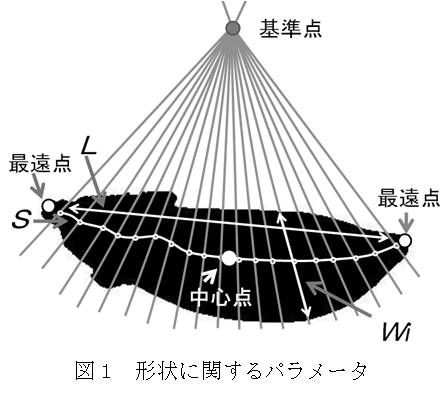
丂廂妌偝傟偨壥幚偼儘儃僢僩偺儅僔儞價僕儑儞傑偱斃憲偝傟丆夋憸擖椡偑峴傢傟傞丅摼傜傟偨夋憸偵擇抣壔側偳偺慜張棟傪峴偭偨偁偲丆奺僷儔儊乕僞傪媮傔傞丅恾1偵帵偡傛偆偵丆傑偢壥幚偺拞怱偲壥幚椉抂偺2揰乮嵟墦揰乯傪捠傞墌偺拞怱傪媮傔偰婎弨揰偲偟偨丅偮偓偵婎弨揰偐傜曻幩忬偺捈慄傪摍娫妘偵堷偄偰壥幚傪暘妱偟偨丅暘妱偝傟偨晹暘偺挿偝傪壥幚暆Wi偲偟丆嵟戝偺壥幚暆傪Wmax偲偟偨丅奺抐柺偺拞揰傪楢寢偟偰壥幚偺拞怱慄(挿偝S乯偲偟丆拞怱慄偺椉抂傪寢傫偩捈慄偺挿偝L傪壥幚挿偲偟偨丅偙傟傜偺僷儔儊乕僞傪婎偵丆壥幚偺宍忬傪昞偡嬋棪丆墌宍棪丆愭嵶傝側偳偺僷儔儊乕僞傕嶼弌偟偨丅嬋棪偼L/S偱媮傔傜傟丆嬋偑傝偺側偄壥幚傎偳1偵嬤偄抣傪庢傞丅Wmax/S偱媮傔傜傟傞墌宍棪偼壥幚偺娵傒傪昞偡僷儔儊乕僞偱偁傝丆墌宍偵嬤偄壥幚傎偳偦偺抣偼1偵嬤偯偔丅傑偨丆愭嵶傝偼壥捀晹偺偔傃傟偨宍忬傪昞偡傕偺偱偁傝丆壥幚暆Wi偺嵎暘傪媮傔丄偦偺曄壔偺悇堏偐傜媮傔偨丅傑偨丆摨條偵壥幚暆Wi偺曄壔偺悇堏偐傜丆僈僋偲壥幚偺嫬奅傕専弌偟偨丅崱夞偺幚尡偱偼丆姅娫60 cm偱8姅偺愮椉僫僗傪3楍丆擾妛晹撪偺價僯儖僴僂僗偱嵧攟偟丆廂妌偝傟偨僫僗20杮傪幚尡懳徾偲偟偨丅
3. 寢壥偍傛傃峫嶡
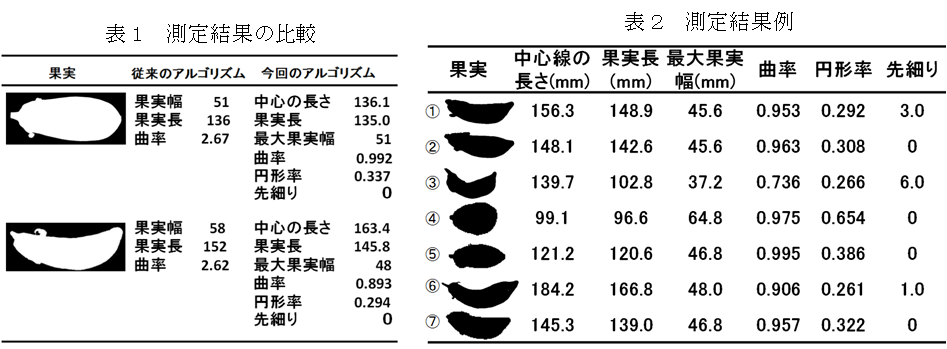
丂昞侾偵廬棃偺傾儖僑儕僘儉傪梡偄偨夋憸張棟寢壥偲偺斾妑椺傪帵偡丅廬棃偺傾儖僑儕僘儉偱偼丆壥幚傪埻傓挿曽宍偺廲偍傛傃墶偺挿偝偺斾傪梡偄偰壥幚暆傗嬋棪傪媮傔偰偄偨丅傛偭偰丆堎側傞宍忬偺壥幚偱傕廲墶斾偑摨條偺抣偲側傞偙偲偑偁傝丄惓妋側摿挜偺拪弌偼崲擄偱偁偭偨丅杮尋媶偱奐敪偟偨傾儖僑儕僘儉偱偼丆嬋偑傝傗懢偝側偳偵娭傢傞僷儔儊乕僞偺嶼弌偼撈棫偟偰偍傝丆屳偄偵塭嬁傪媦傏偝側偄偨傔壥幚偺宍忬傪斀塮偟偨抣偑嶼弌偝傟偰偄傞丅昞俀偵偼崱夞偺傾儖僑儕僘儉傪梡偄偨寁應寢壥偺椺傪帵偡丅嬋偑傝偺戝偒側壥幚傎偳壥幚挿L偵懳偡傞拞怱慄偺挿偝S偑戝偒偄偨傔丆嬋棪偼彫偝側抣偲側傝丆嵟傕嬋偑傝偺彮側偄壥幚嘍偑崅偄抣偲側偭偰偄傞丅傑偨丆墌宍棪偼壥幚嘋偑丄愭嵶傝偵偍偄偰偼嘊偑懠偺壥幚偵斾傋偰傕旕忢偵崅偄抣偲側傝丆壥幚偺宍忬傪傛偔昞偟偰偄傞偙偲偑暘偐傞丅埲忋偺寢壥偐傜丆崱夞専摙偟偨傾儖僑儕僘儉偵傛偭偰壥幚偺條乆側摿挜傪嬶懱揑偵悢抣壔偱偒偨偲偄偊傞丅崱屻丆偙偺傾儖僑儕僘儉傪堏摦宆慖壥儘儃僢僩偵幚憰偡傞偙偲偵傛傝丆壥幚偺宍忬偵娭傢傞傛傝徻嵶側昳幙忣曬偑妉摼偱偒傞偲峫偊傜傟傞丅