ナスを対象とした移動型選果ロボット -ロボットの試作と基礎実験-
ナスを対象とした移動型選果ロボット
-ロボットの試作と基礎実験-
寺崎 栄一
1. はじめに
現在,作物の成育環境や土壌成分などのモニタリング技術とマシンビジョンを用いて高速かつ定量的に農産物の品質評価を行う技術が確立されており,圃場や品質に関する正確な情報を得ることができる。しかし,農産物は収穫の段階で圃場から分離されるため,圃場および品質に関する情報のリンクが途切れ,一貫した生産履歴が構築できない。そこで本研究では,農産物の一貫したトレーサビリティの構築を目的に,収穫と同時に品質評価を行う移動型選果ロボットを試作し,基礎実験を行った。
2. ロボットの構成
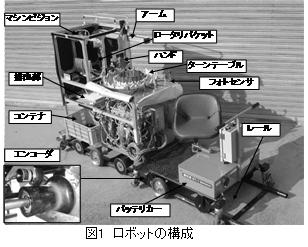
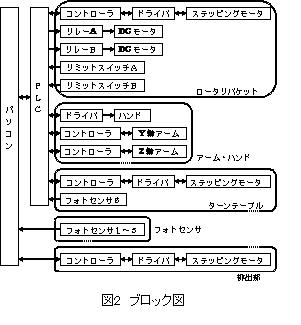
ロボットの主な構成要素は図1に示すように,収穫した果実を置くターンテーブル,果実を搬送するアーム, 2方向から果実の画像を入力するマシンビジョンとロータリバケット,排出部,コンテナ,移動機構およびロボットの位置を検出するエンコーダである。図2にロボットのブロック図を示す。
作業の流れとしては16個の果実が収容可能なターンテーブルが一定速度で回転しており,果実が置かれると,フォトセンサが反応する。同時にその時のロボットの位置を果実の収穫位置として保存する。所定の位置にターンテーブルが回転すると,アームの先端に装着されたハンドが果実を把持し,ロータリバケットまで搬送する。マシンビジョンによる表面の画像入力が行われた後,ロータリバケットが180°反転し,裏面の画像入力が行われる。2つの画像から算出された特徴量を基に品質評価が行われ,その結果に応じて排出部により規格外と出荷用の2種類のコンテナのいずれかへ果実が分類される。
ハンドは昨年度の基礎実験を基に,より高い把持率が実現できるよう,形状および材質を改良した。果実収穫は人間が行い,ロボットは作物列の間に設置されたレールの上をバッテリカーでけん引される。対象には農学部のビニールハウスで栽培した千両ナス500個を用いて実験を行った。
3. 結果および考察
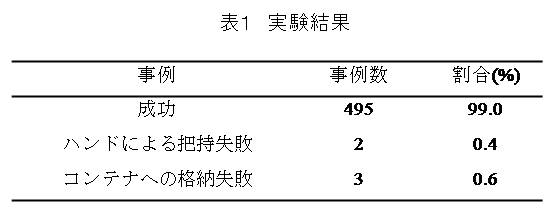
表1に示すように実験の結果,99.0%(495個)の果実に対してフォトセンサによる検出からコンテナへの分類までの動作が良好に行われた。昨年度試作したハンドでは,両端の細い果実を確実に把持できず,落下させる事例が全体の3%生じたが,フィンガの形状を改良し,フレキシブルな素材に変更することで,同様の現象を0.4%(2個)に抑えることができた。また,コンテナに格納されなかった果実が0.6%(3個)あった。その原因は,画像入力が完了してロータリーバケットから落下する際に、ロボットが移動を開始して振動が生じ,果実が排出部からはみ出したためである。
なお、ターンテーブルにおかれた果実がコンテナに格納されるまでに要した時間は53秒であった。ターンテーブルには複数の果実を置くことが可能なので,実際には19秒に1果実の処理時間であり,ほぼ人間の作業速度と同じスピードで処理を行うことができる。ターンテーブルやアームの速度を上げることで,この処理時間は短縮することができるため,人間の作業速度に応じてロボットの処理速度を変化させることも可能である。
今後の課題としては、ロボットのさらなる小型化やレールがない圃場での作業,振動に対する耐久性が挙げられる。