移動型選果ロボットは収穫したナスを待機させるターンテーブル、画像処理を行うためにナスを移動するマニピュレータの2点からなる供給部、品質評価を行うマシンビジョン、ナスを全面撮影するためのバケットの2点からなる画像処理部、仕分けを行う排出部、移動型選果ロボットの位置情報を得る走行部の以上4つのセクションで構成され、本研究では供給部と画像処理部のバケットの試作を行った。
3. 実験方法
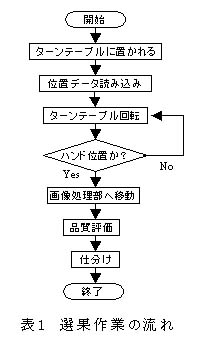
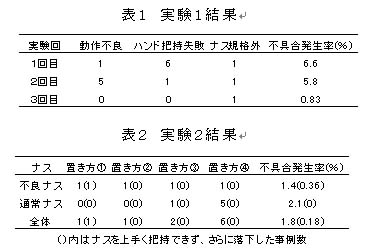
収穫から選果までの流れを図1に示した。実験対象は岡山大学農学部内で栽培された収穫適期のナス121個(品種:千両ナス)とし、実験は2つ行った。実験1…121個のナスを全て選果ロボットにて選果し不具合の内容と発生頻度を確認した。 実験2…(1)においてハンドがナスの把持を失敗した事例について失敗したナス7本と無作為に選出したナス7本の合計14本を1本につき40回(10回ごとに置きかたを90度回す)ずつ選果し、ハンドが把持を失敗しやすいナスの形状と失敗の発生頻度を調べた。