ナスを対象とした移動型選果ロボット -ロボットの制御と圃場マッピング-
ナスを対象とした移動型選果ロボット
-ロボットの制御と圃場マッピング-
清家 千裕
1. はじめに
現在、ナスの品質評価は画像処理によって農家単位で栽培されたナスの非常に細かく正確なデータを得ることが出来るようになっている。しかし現状では、収穫されたナスは一度集荷場に集められてから品質評価を行うため、得られた品質データと圃場において施された水や肥料の投入量などのデータとの関連付けがなされていない。そこで本研究ではナスの品質データと栽培環境のデータを関連付けすることを目的とした移動型選果ロボットを考案・試作し、動作実験を行った。
2. 実験装置および方法
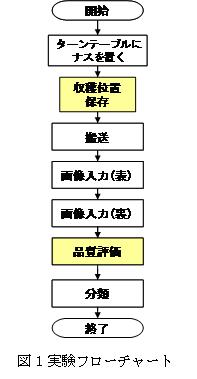
図1に実験のフローチャートを示す。まず,作業者によって収穫されたナスがロボットのターンテーブルに置かれると,フォトセンサが反応して,収穫された株の位置が保存される。ロボットの移動距離はロータリエンコーダで検出し,収穫開始地点からの距離とそれぞれの株の位置を対応させて収穫位置を特定した。つぎに,果実はアームによってマシンビジョンの直下に設置されたロータリバケットまで搬送され,果実の表と裏の画像が取り込まれる。それらの画像から算出された果実長,曲がり,疑似質量などのパラメータを基に果実の品質評価を行い,その結果を収穫位置の情報と共に保存する。最終的に果実は,各コンテナに分類される。今回の実験では,各パラメータのしきい値を任意に設定し,規格外の果実とそれ以外の2種類のコンテナに分類した。ロボットによって収集した情報は精密畑作栽培管理用ソフトで構築した。実験は農学部内のビニルハウスで栽培したナスを対象に行った。ナスは1株ずつ木箱に土壌を入れ,ロボット作業が行える空間を確保するため,主枝一本仕立てとした。1列26株を3列配置し,栽培条件を変化させた。また,各作物列の間にロボット移動用のレールを設置した。
3. 結果および考察
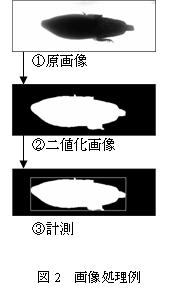
図2に2007年1月26日に収穫された果実の画像処理の例を,図3に同日の収量(本数)と果実長のマップを例として示す。メッシュの色が薄いほど小さな値を示し,白のメッシュはその日に収穫されなかったことを表す。果実の収穫と同時に評価を行うことで,品質に関わる圃場マップの作成が可能となり,ばらつきを定量的かつ視覚的に把握することができた。図ではある1日の例を示したが,期間の累積値の表示や収穫日による比較を行うことも可能であり,施肥量や灌水量などもあらかじめ入力しておけば,各種投入資材に関するマップが作成できる。このように,収穫位置と品質のデータをリンクさせることで,インプット(成育環境に関わる要因)とアウトプット(品質,収量など)の関係を把握することが可能となり,今後,生産者にとって大きなメリットになると考えられた。