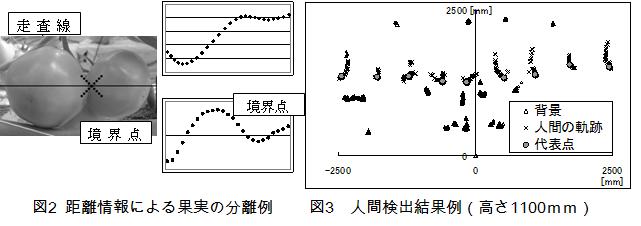
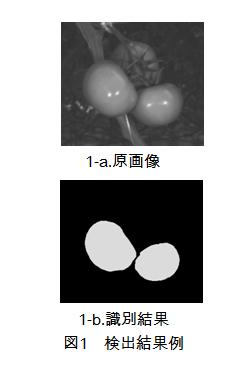
①果実検出:図1に検出結果例を示す。まずは原画像に対してHLS変換およびSobelフィルタによる処理を行い,赤の領域ならびに輪郭線の抽出を行った。次に両処理画像を統合し,果実の検出と分離を行った。実験の結果,ほぼ良好に検出されたが,隣接する果実との境界(影の部分)が明瞭でない状況では分離できない場合があった。レーザ距離計を用いた実験(図2)では,得られた距離情報の差分を求めることにより,境界を検出することが可能であった。よって,画像による熟度判断,画像および距離情報による分離を併用すれば収穫適期果実の検出に有効であると考えられた。②安全システム:図3に実際の施設で行った実験結果(表示は1秒間隔)の一例を示す。背景以外に,一定の幅以上の物体があれば,それを移動物体と見なし,その中で最も距離の小さな点を代表点とした。人間と背景との分離や人間の移動の検出も良好に行われており,レー ザ距離計による安全システムの有効性が確 認された。今後はこの情報をロボット制御 (加減速,停止など)にフィードバックす ることで,人間との協調作業が可能となる。