擾嬈暘栰偵偍偗傞僥儗儘儃僥傿僋僗偺尋媶
劅奜奅僙儞僔儞僌僔僗僥儉偺夵椙劅
彫椦 岾巌
I丂偼偠傔偵
偙傟傑偱偵擾嬈梡僥儗儘儃僥傿僋僗1)偵偍偗傞忣曬廂廤儘儃僢僩偺奜奅僙儞僒2)偲偟偰僇儔乕TV僇儊儔偲儗乕僓嫍棧寁傪搵嵹偟丆僩儅僩偺壥朳撪偐傜廂妌揔婜偺壥幚傪幆暿偡傞僔僗僥儉偑奐敪偝傟偰偒偨偑丆2偮偺壥幚傪1偮偺壥幚偲幆暿偡傞栤戣傗枹惉弉壥傪惉弉壥偲幆暿偡傞栤戣側偳偑巆偝傟偰偄偨丅偦偙偱杮尋媶偱偼丆壥幚幆暿傾儖僑儕僘儉傪拞怱偵僙儞僔儞僌僔僗僥儉偺夵椙傪峴偭偨丅
II丂幚尡憰抲偍傛傃曽朄
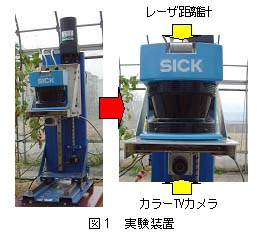
侾丏幚尡憰抲
恾1偵幚尡憰抲傪帵偡丅帇妎僙儞僒偲偟偰僇儔乕TV僇儊儔乮夝憸搙1024亊768乯丆嫍棧僙儞僒偲偟偰儗乕僓嫍棧寁傪梡偄偨丅儗乕僓嫍棧寁偼2師尦暯柺撪傪愵宍偵憱嵏偟丆廃埻偺暔懱傑偱偺嫍棧忣曬傪廂廤偡傞丅偙偺椉僙儞僒傪徃崀憰抲偵搵嵹偟丆悅捈曽岦偺僗僩儘乕僋300 mm傪3.3 mm娫妘偱壓崀偝偣側偑傜懳徾暔偺僇儔乕夋憸偲3師尦嫍棧忣曬傪庢摼偟偨丅
俀丏幚尡曽朄
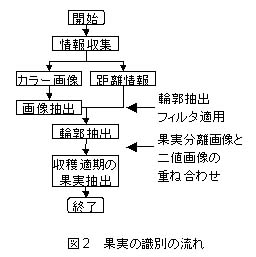
壥幚幆暿偺棳傟傪恾2偵帵偡丅傑偢丆椉僙儞僒偵傛偭偰僇儔乕夋憸偲嫍棧忣曬傪廂廤偟偨丅偙偙偱椉僙儞僒偺帇栰傪摨偠偵偡傞偨傔丆僇儔乕夋憸偼拞墰偺1024亊13夋慺傪墶曽岦偵偦傟偧傟拪弌偟丆偦傟傜傪楢寢偟偨乮埲壓丆楢寢夋憸乯乮恾3-a乯丅偙偺楢寢夋憸偵懳偟偰僲僀僘彍嫀摍偺張棟傪峴偭偨屻丆RGB惉暘偺偟偒偄抣傪梡偄偰擇抣壔偟丆廂妌揔婜偺壥幚傪拪弌偟偨乮埲壓丆擇抣夋憸乯乮恾3-b乯丅擇抣夋憸偐傜堦掕偺斖埻撪偺嫍棧忣曬偵偩偗椫妔拪弌僼傿儖僞傪揔梡偟偰椫妔傪嶼弌偟丆偦偺撪晹傪壥幚偲偟偰拪弌偟偨乮埲壓丆壥幚暘棧夋憸乯乮恾3-c乯丅偙偺帪丆椫妔晹暘偼壥幚晹暘偐傜彍奜偝傟傞偨傔丆幚嵺偺壥幚傛傝傕彫偝側壥幚偑拪弌偝傟傞丅偦偟偰丆擇抣夋憸偲壥幚暘棧夋憸傪廳偹崌傢偣丆擇抣夋憸偱拪弌偟偨壥幚晹暘偑堦掕埲忋偺妱崌偱懚嵼偡傟偽丆廂妌揔婜偺壥幚偲敾抐偟偨乮恾3-d乯丅杮幚尡偱偼丆堦斒揑偵椫妔拪弌偵梡偄傜傟傞3庬椶偺僼傿儖僞乮Sobel丆Prewitt丆Roberts乯傪梡偄偰丆偦傟偧傟偺桳岠惈傪斾妑偟偨丅
III丂寢壥偍傛傃峫嶡
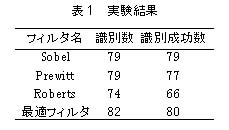
97屄偺壥幚偵懳偟偰峴偭偨幚尡寢壥傪昞1偵帵偡丅昞拞偺幆暿悢偲偼僙儞僔儞僌僔僗僥儉偑惉弉壥偱偁傞偲敾抐偟偨悢丆幆暿惉岟悢偲偼幆暿悢偺偆偪幆暿岟偟偨惉弉壥偺悢丆嵟揔僼傿儖僞偲偼奺僼傿儖僞傪斾妑偟偰嵟傕幆暿悢偑懡偐偭偨僼傿儖僞傪偦偺壥朳偱偺巊梡僼傿儖僞偲偟偰嶼弌偟偨寢壥偱偁傞丅壥幚97屄偺偆偪惉弉壥偑84屄丆枹弉壥偑13屄偱偁偭偨丅廂妌揔婜偺壥幚偵懳偡傞幆暿悢偼Sobel偑79屄丆Prewitt偑77屄丆Roberts偑66屄丆嵟揔僼傿儖僞偺応崌偑80屄偱偁偭偨丅
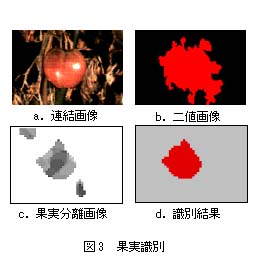
幆暿寢壥偺堦椺傪恾4偵帵偡丅僇儔乕僇儊儔偐傜摼傜傟偨楢寢夋憸乮恾4-a乯偵懳偟丄擇抣夋憸偍傛傃壥幚暘棧夋憸偑偦傟偧傟恾4-b丆恾4-c偺傛偆偵拪弌偝傟偨丅偦偟偰丆擇抣夋憸偲壥幚暘棧夋憸傪廳偹崌傢偣偨寢壥丆奺僼傿儖僞偵傛偭偰恾4-d偺傛偆側幆暿寢壥偑摼傜傟偨丅偙偺椺偺応崌丆壥幚1偼偄偢傟偺僼傿儖僞偱傕幆暿偝傟丆壥幚偺宍忬傕擣幆偝傟偨丅壥幚2丆3偼Sobel丆Prewitt偱幆暿偍傛傃宍忬偺擣幆傕峴傢傟偨偑丆Roberts偱偼椉壥幚偑楢寢偝傟偨丅偙傟偼丆壥幚2偲3偺廳側傝崌偭偰偄傞晹暘偺悅捈曽岦偺椫妔偑Roberts偱偼擣幆偱偒側偐偭偨偨傔偲峫偊傜傟傞丅壥幚4偼丆偄偢傟偺僼傿儖僞偱傕幆暿偱偒側偐偭偨丅偙傟偼丆壥幚3偵傛偭偰戝敿偑塀偝傟偰偍傝柺愊傕彫偝偄偨傔丆椫妔傪拪弌偡傞帪偵彍嫀偝傟偨偨傔偱偁傞丅

恾4偵帵偟偨椺埲奜偵傕丆師偺傛偆側帠椺偑妋擣偝傟偨丅嘆椬愙偡傞壥幚娫偺椫妔偑擣幆偱偒側偐偭偨応崌丆嘇壥幚偑専弌偝傟側偐偭偨応崌丆嘊1偮偺壥幚傪2偮偺壥幚偲擣幆偟偨応崌丆嘋梩傪惉弉壥偲偟偰幆暿偟偰偟傑偭偨応崌丆偱偁傞丅
嘆偵娭偟偰偼丆Sobel偱偼妋擣偝傟側偐偭偨偨傔丆暋悢偺僼傿儖僞傪梡偄傞偙偲偱夵慞偝傟傞偲峫偊傜傟傞丅嘇偼恾4-a偺壥幚4偺傛偆側応崌偱偁傝丆偙偺傛偆偵懠偺壥幚傗巬丆梩側偳偑栚揑壥幚偺慜偵懚嵼偡傞応崌偼丆偳偺傛偆側僼傿儖僞傪梡偄偰傕幆暿偱偒側偄偲峫偊傜傟傞丅偙偺応崌丆摨偠壥朳偵懳偟偰暋悢偺妏搙偐傜偺寁應傪峴偆偙偲偱夵慞偑壜擻偱偁傞偲峫偊傜傟傞丅偙傟埲奜偵傕丆壥幚暘棧夋憸偲偟偰拪弌偝傟偨偑丆擇抣夋憸偺壥幚晹暘偑堦掕埲忋偺妱崌懚嵼偟側偐偭偨応崌傕壥幚偺専弌偑偱偒側偐偭偨丅杮尋媶偱偼丆岝偺嫮偝傗岦偒偑堎側傞偲丆斀幩傗塭偺塭嬁偵傛偭偰壥幚偲偟偰擣幆偱偒側偄応崌偑偁偭偨丅崱屻丆嵟揔側岝忦審傪専摙偡傟偽僇儔乕夋憸偐傜壥幚偺柧妋側怓傗宍忬傪擣幆偱偒傞偲峫偊傜傟傞丅嘊偼壥幚昞柺偵墯撌偑偁偭偨偨傔丆偦傟傪椫妔偲擣幆偟偰偟傑偭偨応崌偱偁傞丅崱屻丆椫妔偺偟偒偄抣偺専摙偑昁梫偱偁傞丅嘋偼擇抣夋憸偱廂妌揔婜偺壥幚偩偗偱側偔丆R惉暘偺戝偒偄屚傟梩側偳傕壥幚偲偟偰拪弌偟偨偨傔偱偁傞丅崱屻丆擇抣夋憸傪拪弌偡傞嵺偺偟偒偄抣偺専摙側傜傃偵宍忬偵傛傞幆暿傪峫椂偡傞昁梫偑偁傞丅
崱夞偺幚尡偱3庬椶偺椫妔拪弌僼傿儖僞傪斾妑偟偨寢壥丆Sobel偑嵟傕崅偄幆暿棪傪帵偟偨偑丆Sobel偱幆暿偱偒側偐偭偨壥幚偑Prewitt丆Roberts偱幆暿偱偒偨応崌偑偁傝丆暋悢偺僼傿儖僞傪梡偄傞偙偲偱丆壥幚偺惉弉壥幆暿棪傪岦忋偱偒傞壜擻惈偑妋擣偝傟偨丅偝傜偵丆惉弉壥偺幆暿忦審偵丆壥幚暘棧夋憸忋偵堦掕埲忋偺妱崌偱擇抣夋憸偑懚嵼偡傟偽惉弉壥偲敾抐偡傞偲偟偨偙偲偱丆偁傞掱搙彫偝側壥幚偺専弌傕峴偊偨丅
埲忋傛傝丆1偮偺壥朳偵懳偟偰暋悢偺僼傿儖僞傪暪梡偡傞丆偁傞偄偼丆偝傜偵暋悢偺妏搙偐傜僙儞僔儞僌傪峴偆偙偲偑丆廂妌揔婜偺壥幚幆暿偵桳岠偱偁傞偲峫偊傜傟傞丅
嶲峫暥專
1)丂栧揷廩巌丒嫶杮岾懢丒栄棙寶懢榊丒擄攇榓旻丗擾嬈暘栰偵偍偗傞僥儗儘儃僥傿僋僗丂乗僀儞僞乕僱僢僩夞慄傪棙梡偟偨儘儃僢僩惂屼乗丆擾嬈婡夿妛夛帍娭惣巟晹曬丆94丆67-68丆2003
2)丂栧揷廩巌丒嶰娖挩峀丒栄棙寶懢榊丒擄攇榓旻丗擾嬈暘栰偵偍偗傞僥儗儘儃僥傿僋僗丂乗奜奅僙儞僔儞僌僔僗僥儉乗丆擾嬈婡夿妛夛帍娭惣巟晹曬丆94丆69-70丆2003