農業分野におけるテレロボティクスの研究
-収穫基礎実験-
平位 拓也
1.はじめに
これまでに農業用テレロボティクスの実現に向け,外界センサを搭載した情報収集ロボット,収穫ロボットが開発された。本研究では収穫ロボットの改良ならびに収穫基礎実験を行った。
2.実験装置
収穫ロボットは垂直多関節マニピュレータ,収穫用多指ハンド,昇降装置,移動機構から構成した。また,収穫作業時に果房内の他の果実の位置が変化した場合や,収穫された果実の背後にある収穫適期の果実の位置検出を行う場合にも対応できるようにカラーTVカメラを装着した。
3.実験方法
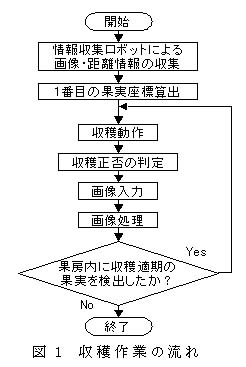
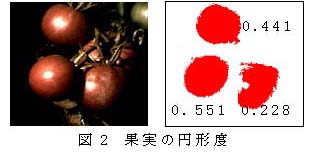
1つの果房に対する収穫作業の流れを図1に示す。情報収集ロボットからの画像および距離情報を基に果房の最も手前にある収穫適期の果実(1番目)の位置を算出し,収穫動作を行った。つぎに,収穫された果実の背後にある収穫適期の果実の位置検出を行うために,カラーTVカメラによる画像入力を行った。その判断は入力画像の R信号を用いた二値画像に基づいて行い,収穫すべき果実が複数存在する場合には手前の果実から収穫した。果実の前後関係は式(1)の円形度によって求めた。物体に隠されていない果実ほど円形度の値が1に近くなるため,手前に存在する確率が大きいと判断した(図2)。果実の中心座標を算出し,ハンドを接近させ収穫動作を行った後,ハンドをカメラ前方に移動させ果実が収穫できたかどうかを判断した。収穫できなかった場合には再び同一の収穫作業を行い,果房内に収穫すべき果実がなくなれば次の果房へ移動させた。
円形度=4π×面積/(周囲長)2 ( 1 )
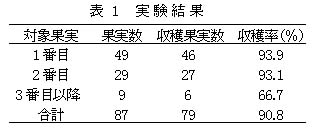
4.結果および考察
表1に実験結果を示す。情報収集ロボットからの情報のみで収穫を行った場合,2番目以降の収穫率は35%程度であったが収穫ロボットにもカラーTVカメラを搭載することにより86%以上の果実を収穫することができた。失敗事例として果柄が短くハンドで果実を把持できない場合や,隣接する果実を同一の果実と認識した結果,誤った座標にハンドが接近して収穫に失敗する場合があった。今後は,ハンドの接近方法の改良を行うとともに,複数の方向からの画像入力の検討などが課題である。