擾嬈暘栰偵偍偗傞僥儗儘儃僥傿僋僗偺尋媶丂亅堏摦婡峔偺夵椙亅
擾嬈暘栰偵偍偗傞僥儗儘儃僥傿僋僗偺尋媶丂亅堏摦婡峔偺夵椙亅
揷撶丂夒峅
1. 偼偠傔偵
丂恖娫偲儘儃僢僩偑嫤挷偟偰嶌嬈傪峴偆僥儗儘儃僥傿僋僗偺尋媶偑偙傟傑偱峴傢傟偰偒偨偑堏摦婡峔偺惂屼偼峴偭偰偄側偐偭偨丅偦偙偱杮尋媶偱偼丆惂屼偑壜擻側堏摦婡峔偵夵椙偟丆傎応偵偰儘儃僢僩傪梡偄偨幚尡傪峴偭偨丅
2. 幚尡憰抲
丂儘儃僢僩偺憱峴晹偵偼巗斕偺揹摦戜幵乮埲壓丆戜幵偲徧偡傞乯傪巊梡偟丆帋嶌偟偨儗乕儖忋傪堏摦偝偣傞偙偲偲偟偨丅戜幵偺懍搙偼儗僶乕偺埵抲偵傛偭偰挷愡壜擻偱丆嵟戝愊嵹検300kg丆嵟戝懍搙1.25m/s偱偁傞丅戜幵偺慜恑丆掆巭偼僜儗僲僀僪偵傛偭偰儗僶乕傪堦掕偺埵抲偵堏摦偝偣偰峴偭偨丅傑偨丆儘乕僞儕僄儞僐乕僟傪慜椫偺夞揮塣摦偲楢摦偝偣偰堏摦嫍棧傪専弌偟偨丅傎応偱偺幚尡偱偼儗乕僓嫍棧寁偲僇儔乕TV僇儊儔傪憰拝偟偨忣曬廂廤儘儃僢僩乮幙検62.1kg乯偲廂妌儘儃僢僩乮幙検82.5kg乯傪偦傟偧傟搵嵹偟偨丅
3. 幚尡曽朄
丂憱峴拞偵戜幵傪媫掆巭偝偣傞偲搵嵹偟偨婡婍偵塭嬁傪梌偊傞偨傔丆杮尋媶偱偼僜儗僲僀僪傪OFF偵偟偨偁偲丆嫮惂揑偵僽儗乕僉傪偐偗傞憖嶌偼峴傢偢偵掆巭偝偣傞偙偲偵偟偨丅偦偙偱傑偢丆戜幵傪敪恑偝偣偰偐傜愝掕嫍棧偵払偡傞偲僜儗僲僀僪傪OFF偵偟丆幚嵺偵掆巭偟偨埵抲傪寁應偟偨丅寁應偼愝掕嫍棧偍傛傃愊嵹幙検乮2戜偺儘儃僢僩偵憡摉暘乯傪曄壔偝偣偰峴偭偨丅傎応偱偺廂妌幚尡偱偼丆傑偢忣曬廂廤儘儃僢僩傪搵嵹偟丆戜幵偺掆巭埵抲偲僩儅僩壥幚偺3師尦嵗昗傪専弌偡傞丅師偵廂妌儘儃僢僩傪搵嵹偟丆戜幵偑掆巭偟偨埵抲偲忣曬廂廤儘儃僢僩偺掆巭埵抲偵嵎偑偁傟偽丆廂妌懳徾壥幚偺嵗昗傪曗惓偟偰廂妌摦嶌傪峴偆傕偺偲偟偨丅
4. 寢壥偍傛傃峫嶡
丂恾侾偵戜幵偺憱峴嫍棧偲懍搙偺堦椺傪帵偡丅僜儗僲僀僪傪ON偵偡傞偲壛懍屻400乣500mm/s偺懍搙偱憱峴偟丆僜儗僲僀僪傪OFF偵偡傞偲500mm掱搙憱峴偟偰掆巭偟偨丅恾2偼僜儗僲僀僪傪OFF偵偟偨帪偺嫍棧偲幚嵺偺憱峴嫍棧傪帵偡丅寢壥傛傝丆儘儃僢僩偑椬傝崌偆姅娫乮嫍棧500mm掱搙乯傪堏摦偡傞偵偼丆忣曬廂廤儘儃僢僩偱193mm,廂妌儘儃僢僩偱偼224mm偺嫍棧偑僄儞僐乕僟偱専弌偝傟偨帪揰偱僜儗僲僀僪傪OFF偡傟偽傛偄偙偲偵側傞丅傎応幚尡乮恾3乯偺寢壥丆椉儘儃僢僩偺掆巭埵抲偺嵎偼6mm掱搙偱偁傝丆儅僯僺儏儗乕僞偺嶌摦椞堟傪墇偊傞応崌偼側偔丆曗惓偟偨壥幚偺3師尦嵗昗傪傕偲偵廂妌摦嶌偑峴傢傟偨丅
恾1丂戜幵偺憱峴嫍棧偲懍搙
|
恾2丂僜儗僲僀僪OFF帪偺嫍棧偲憱峴嫍棧
|
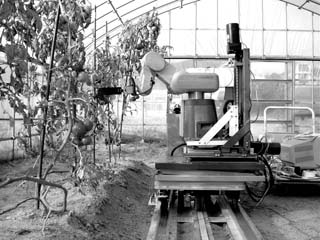
恾3丂幚尡晽宨
|
懖榑敪昞
僥儗儘儃