擾嬈暘栰偵偍偗傞僥儗儘儃偺帋傒
乗 奜奅僙儞僔儞僌僔僗僥儉 乗
壀嶳戝妛丂栧揷廩巌丒仜嶰娖挩峀丒嫶杮岾懢丒
栄棙寶懢榊丒擄攇榓旻 丂丂丂丂丂
乮姅乯僨傿乕傾僪僫僀儞僗丂惣丂戩榊
Keywords丗儘儃僢僩丆墦妘憖嶌丆僀儞僞乕僱僢僩丆儅儞}僔儞嫤挷丆
僗乕僷僶僀僓儕僐儞僩儘乕儖
I丂偼偠傔偵
丂尰嵼傑偱偵丆擾嬈暘栰偵偍偄偰傕條乆側儘儃僢僩偺尋媶偑峴傢傟偰偒偨偑丆幚梡壔偵帄偭偨傕偺偼傢偢偐偱偁傞丅偦偺棟桼偲偟偰偼丆恖娫偑擾嶌嬈偵偍偄偰挿擭偺宱尡傗姩偵婎偯偄偰峴偭偰偄傞敾抐擻椡偑儘儃僢僩偵廫暘偵旛傢偭偰偄側偄偙偲傗丆儔儞僟儉偵攝抲偝傟偨攚宨偺拞偐傜懳徾暔傪専弌偡傞帇妎晹偺婡擻偑傑偩廫暘偱偼側偄偙偲側偳偑嫇偘傜傟傞丅偟偐偟丆恖娫偑儘儃僢僩偺嬯庤側晹暘傪恖娫偑曗偆偙偲偵傛偭偰丆擾嶌嬈偺儘儃僢僩壔偑悇恑偝傟傞壜擻惈偼旕忢偵崅偄丅偮傑傝丆儘儃僢僩偲恖娫偑嫤挷嶌嬈傪峴偆偙偲偵傛偭偰丆偙傟傑偱偵拁愊偝傟偨儘儃僢僩媄弍傪桳岠棙梡偱偒傞丅杮尋媶偼丆擾嬈暘栰偵偍偗傞僥儗儘儃僥傿僋僗偺奐敪傪嵟廔栚昗偲偟偰偍傝丆慜曬1乯偱偼偦偺峔憐傪弎傋偨丅杮曬偱偼丆僇儔乕CCD僇儊儔偲儗乕僓嫍棧寁偐傜峔惉偝傟傞奜奅僙儞僔儞僌僔僗僥儉乮帇妎晹乯偺専摙傪峴偭偨丅
II丂擾嬈梡僥儗儘儃僥傿僋僗偺峔憐
丂杮尋媶偱偼擾嬈暘栰偵僥儗儘儃僥傿僋僗傪摫擖偡傞偵偁偨偭偰丆師偺俁揰傪忦審偲偟偰愝掕偟偨丅
侾丏帪娫丆応強丆巊梡幰傪慖偽側偄偙偲丗儘儃僢僩偲偺捠怣偵愱梡夞慄傗愱梡偺惂屼傾僾儕働乕僔儑儞傪梡偄傞偺偱偼側偔丆尰嵼晛媦偟偰偄傞僀儞僞乕僱僢僩夞慄偲堦斒揑側僽儔僂僓傪棙梡偡傞丅偙傟偵傛傝堦斒揑側僷僜僐儞偲僀儞僞乕僱僢僩夞慄偝偊偁傟偽丆偄偮偱傕偳偙偱傕嶌嬈偑壜擻偲側傞丅
俀丏嶌嬈幰偺晧扴傪嵟彫尷偵偡傞偙偲丗儅僗僞丒僗儗乕僽惂屼偱偼側偔丆僗乕僷僶僀僓儕僐儞僩儘乕儖乮娗棟惂屼乯傪梡偄傞偙偲偵傛偭偰丆恖娫偼儘儃僢僩偺敾抐偵懳偟偰廋惓傗僠僃僢僋偺傒傪峴偄丆儘儃僢僩偼帺棩揑偵嶌嬈傪峴偆丅偙傟傑偱偵尋媶偝傟偰偒偨傎偲傫偳偺儘儃僢僩偼姰慡帺棩宆傪憐掕偟偰偄傞偺偱丆偦偺拁愊偝傟偨媄弍傪桳岠棙梡偱偒傞丅
俁丏暋悢偺嶌嬈偵懳墳偱偒傞偙偲丗懳徾嶌嬈傪暋悢梡堄偡傞偙偲偵傛偭偰丆斈梡惈偺崅偄儘儃僢僩僔僗僥儉偲側傞丅偨偲偊偽丆儘儃僢僩偺敾抐傪僠僃僢僋偡傞応崌丆廂妌傗杊彍丆檼掕側偳偺僐儅儞僪傕梡堄偟偰偍偗偽丆堦搙偺僇儊儔堏摦偱暋悢偺嶌嬈傪搊榐偡傞偙偲偑偱偒傞丅傑偨丆堦恖偺嶌嬈幰偑暋悢偺儘儃僢僩傪憖嶌偡傞偙偲偵傛偭偰丆嶌嬈偺岠棪壔丆徣椡壔傕恾傟傞丅
III丂僥儗儘儃僥傿僋僗偺奣梫
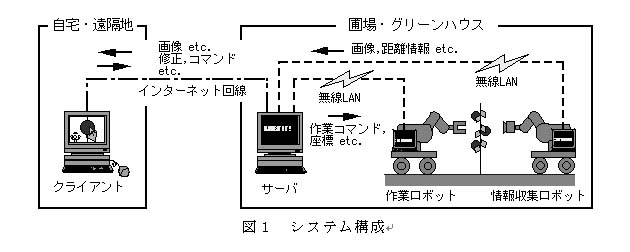
丂杮尋媶偱憐掕偡傞僥儗儘儃僥傿僋僗偺僔僗僥儉峔惉傪恾1偵帵偡丅側偍杮尋媶偱偼丆僩儅僩偺廂妌嶌嬈傪憐掕偟偰偄傞丅傑偨丆奜奅僙儞僔儞僌僔僗僥儉傪搵嵹偟偨忣曬廂廤儘儃僢僩偲嶌嬈儘儃僢僩乮廂妌儘儃僢僩乯偼偦傟偧傟扨撈偱懚嵼偡傞偙偲偲偡傞丅
丂僋儔僀傾儞僩乮嶌嬈幰乯偲儘儃僢僩偺捠怣偼僒乕僶傪夘偟偰峴偆傕偺偲偟丆僋儔僀傾儞僩偲僒乕僶偼僀儞僞乕僱僢僩偱丆儘儃僢僩偲僒乕僶偼柍慄LAN偱捠怣傪峴偆丅忣曬廂廤儘儃僢僩偼丆懳徾暔偺夋憸傗嫍棧忣曬傪僒乕僶偵憲怣偡傞丅僒乕僶偱偼廂妌揔婜偺敾抐傗懳徾暔偺幆暿丆擣幆丆3師尦嵗昗偺専弌傪峴偄丆偦偺寢壥傪僋儔僀傾儞僩偺僨傿僗僾儗僀偵昞帵偡傞丅儘儃僢僩偺敾抐傪嶌嬈幰偑僠僃僢僋偟丆娫堘偭偨敾抐偑偁傟偽僨傿僗僾儗僀忋偱廋惓傪壛偊傞丅傑偨丆昦奞側偳偑妋擣偝傟偨応崌偵偼丆僨傿僗僾儗僀忋偱昦奞売強傪僋儕僢僋偟丆儊僯儏乕偐傜杊彍傪慖戰偡傞丅恖娫偑巜帵偟偨柦椷傗僨傿僗僾儗僀忋偺嵗昗偼僒乕僶偵憲傜傟丆僒乕僶偱嵞寁嶼傗3師尦嵗昗曄姺偑峴傢傟丆偦偺寢壥偑奺嶌嬈傪嶌嬈儘儃僢僩偵憲怣偝傟傞丅嶌嬈儘儃僢僩偼僒乕僶偐傜憲傜傟偰偒偨懳徾暔偺3師尦嵗昗傗柦椷偵廬偭偰丆帺棩揑偵嶌嬈傪悑峴偡傞丅
IV丂奜奅僙儞僔儞僌僔僗僥儉
 1丏峔惉
1丏峔惉
丂儘儃僢僩偺帇妎晹偵偼僇儊儔偑庡偵梡偄傜傟偰偄傞偑丆夋憸偩偗偱偼懳徾暔偺惓妋側埵抲傗宍忬丆慜屻娭學偺攃埇偼崲擄偱偁傞丅偦偙偱杮尋媶偱偼丆奜奅僙儞僔儞僌僔僗僥儉偵僇儔乕CCD僇儊儔偲儗乕僓嫍棧寁傪暪梡偟丆夋憸偲嫍棧忣曬偐傜懳徾暔偺幆暿丆擣幆丆嫍棧専弌傪峴偆偙偲偲偟偨丅
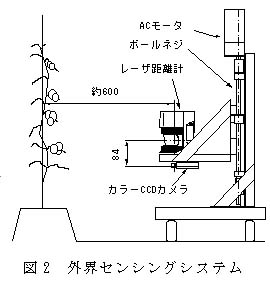
丂恾2偵奜奅僙儞僔儞僌僔僗僥儉偺峔惉傪帵偡丅儗乕僓嫍棧寁乮SICK丂LMS200乯偼撪憼偝傟偨夞揮儈儔乕偵傛傝抧柺偲暯峴側2師尦暯柺撪傪嵟戝180亱丆妏搙暘夝擻0.25亱丆0.5亱 偍傛傃1亱 偱憱嵏偡傞偙偲偑偱偒傞丅偝傜偵丆儗乕僓嫍棧寁傪徃崀憰抲偱忋壓曽岦偵堏摦偝偣傞偙偲偵傛傝丆3師尦嫍棧忣曬傪廂廤偡傞偙偲偲偟偨丅
丂僇儔乕CCD僇儊儔乮Panasonic丂WV-CD2乯偼儗乕僓嫍棧寁偺壓曽84mm偺埵抲偵丆儗乕僓嫍棧寁偺夞揮儈儔乕拞怱偲僇儊儔偺儗儞僘拞怱偑堦抳偡傞傛偆偵憰拝偟偨丅儗乕僓嫍棧寁偲僇儊儔傪憰拝偟偨僥乕僽儖偼揹帴僽儗乕僉晅AC儌乕僞偲儃乕儖僱僕偵傛偭偰忋壓堏摦偟丆偦偺曄埵偑儘乕僞儕僄儞僐乕僟偱専弌偝傟傞丅僥乕僽儖偺堏摦懍搙偼72.2 mm/s丆僗僩儘乕僋偼300 mm偱偁傝丆僥乕僽儖偑3.3 mm壓崀偡傞偛偲偵僇儊儔偵傛傞夋憸擖椡偲儗乕僓嫍棧寁偵傛傞嫍棧専弌傪堦搙峴偄丆崌寁90夞偺忣曬廂廤傪峴偆偙偲偲偟偨丅儗乕僓嫍棧寁偺僗僉儍儞妏搙偼100亱丆妏搙暘夝擻偼0.25亱 偵愝掕偟偨丅
2丏僨乕僞偺廂廤曽朄
丂僇儊儔夋憸偲嫍棧忣曬偺廂廤曽朄偍傛傃懳墳晅偗偼師偺傛偆偵峴偭偨丅傑偢丆儗乕僓嫍棧寁偺僗僉儍儞妏搙偼100亱 偱偁傞偺偱丆僇儊儔偺悈暯夋妏52亱偲堦抳偝偣傞偨傔偵丆儗乕僓嫍棧寁偺惓柺偵懳偟偰嵍塃26亱丆寁52亱偺斖埻偺忣曬偺傒傪敳偒弌偟丆奺憱嵏偱摼傜傟偨忣曬傪曐懚偟偰偍偔丅僇儊儔偵娭偟偰偼丆悅捈曽岦偵40亱偺夋妏傪桳偟偰偄傞偑丆儗乕僓嫍棧寁偺憱嵏曽岦偲堦抳偝偣傞偨傔丆僇儊儔偱摼傜傟偨夋憸拞墰偺暆3夋慺偺椞堟傪悈暯曽岦偵敳偒弌偟偨丅杮尋媶偱偼丆僇儊儔偺儗儞僘偐傜偐傜懳徾暔傑偱偺嫍棧傪栺600 mm 偲憐掕偟偰偍傝丆徃崀憰抲偑忋壓曽岦偵3.3 mm堏摦偟偨応崌丆偦傟偵憡摉偡傞嫍棧偑夋憸忋偱栺3夋慺偱偁傞丅偟偨偑偭偰丆奺夋憸偺暆3夋慺偺晹暘傪悈暯曽岦偵敳偒弌偟偰楢寢偡傟偽丆懳徾暔傪儗乕僓嫍棧寁偲摨曽岦乮抧柺偲暯峴側暯柺乯偐傜尒偨夋憸偑摼傜傟傞偙偲偵側傞丅徃崀憰抲偵傛傞300 mm偺堏摦偑姰椆偡傟偽丆僇儊儔偲儗乕僓嫍棧寁偺僆僼僙僢僩84mm傪峫椂偟丆楢寢夋憸偲嫍棧忣曬偺懳墳晅偗傪峴偆丅
3丏壥幚偺幆暿曽朄
丂杮曬偱偼僩儅僩壥幚偺廂妌傪憐掕偟偰偄傞偺偱丆愒偔弉偟偨壥幚傪幆暿偡傞傾儖僑儕僘儉傪専摙偟偨丅幆暿曽朄偲偟偰偼丆傑偢僇儊儔偺怓忣曬傪棙梡偟丆摼傜傟偨楢寢夋憸偐傜R-G>0偐偮R-Y>35偺忦審傪枮偨偡椞堟傪拪弌偡傞丅師偵丆夋憸偱拪弌偝傟偨椞堟偵憡摉偡傞3師尦嫍棧忣曬偵偍偄偰丆椬愙偡傞専弌揰摨巑偺専弌嫍棧傪斾妑偟丆偦偺嵎偑4 mm埲撪偱偁傟偽摨堦偺暔懱偲偟偰儔儀儕儞僌傪峴偆丅僩儅僩偼堦斒偵悢屄偺壥幚偑椬愙偟偰壥朳傪宍惉偟偰偄傞偺偱丆夋憸偩偗偱偼暋悢偺壥幚傪堦偮偺壥幚偲偟偰専弌偡傞応崌傕偁傞偑丆3師尦嫍棧忣曬偲梈崌偡傞偙偲偵傛傝丆屄乆偺壥幚偺幆暿傗埵抲専弌偑峴偊傞丅
V丂幚尡寢壥偲寢壥
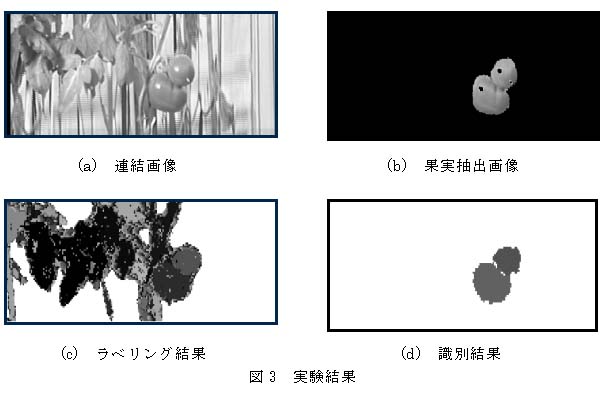
價僯儖僴僂僗撪偱嵧攟偟偨僩儅僩偵懳偟偰丆杮僙儞僔儞僌僔僗僥儉傪梡偄偰峴偭偨幚尡寢壥偺堦椺傪恾3偵帵偡丅(a)偼僇儊儔偐傜摼傜傟偨楢寢夋憸偱偁傝丆忋弎偟偨忦審偱弉偟偨壥幚偺傒傪拪弌偟偨寢壥偑(b)偱偁傞丅(c)偼儗乕僓嫍棧寁偵傛偭偰専弌偝傟偨3師尦嫍棧忣曬慡懱偵懳偟偰儔儀儕儞僌傪峴偭偨寢壥偱偁傞丅杮幚尡偱偼丆廂妌儘儃僢僩偺嶌摦椞堟傪敿宎1 m埲撪偲憐掕偟偨偺偱丆専弌嫍棧偑1 m埲忋偺暔懱偼偁傜偐偠傔僨乕僞偐傜彍奜偡傞傾儖僑儕僘儉偲偟偨丅偟偨偑偭偰丆(c)偺敀怓偺晹暘偼嫍棧偑1 m埲忋偺暔懱偑懚嵼偡傞攚宨偲偟偰昞偝傟偰偄傞丅儔儀儕儞僌偺寢壥丆墯撌偺戝偒側梩偼悢屄偺暔懱偲偟偰専弌偝傟偰偄傞応崌傕尒傜傟偨偑丆壥幚傗巬偼屄乆偺暔懱偲偟偰幆暿偝傟偨丅(d)偵偼夋憸偲3師尦嫍棧忣曬傪梈崌偟偰壥幚偺幆暿傪峴偭偨寢壥傪帵偡丅僇儊儔偺夋憸偩偗偱偼幆暿偑崲擄偱偁偭偨暋悢偺壥幚傕丆3師尦嫍棧忣曬傪暪梡偡傞偙偲偵傛偭偰2屄偺壥幚傪椙岲偵幆暿偡傞偙偲偑偱偒偨丅偟偐偟丆儔儀儕儞僌偺夁掱偵偍偄偰壥暱偺晹暘偱暋悢偺壥幚傪楢寢偟丆堦偮偺壥幚偲偟偰擣幆偡傞応崌傕偁偭偨丅崱屻偼専弌嫍棧偺嵎偩偗偱偼側偔丆宍忬傗戝偒偝側偳偺僷儔儊乕僞傪娷傔偨傾儖僑儕僘儉傪専摙偡傞昁梫偑偁傞偲峫偊傜傟偨丅
VI丂偍傢傝偵
丂忋弎偟偨傛偆偵丆擾嬈暘栰傊偺僥儗儘儃僥傿僋僗偺摫擖偼偙傟傑偱奐敪偝傟偰偒偨帺棩宆擾嬈梡儘儃僢僩偺媄弍傪尰幚揑側傕偺偲偟偰桳岠棙梡偱偒傞偲偄偆儊儕僢僩偑偁傞丅傑偨丆僀儞僞乕僱僢僩側偳傪棙梡偟偨擾嬈媄弍偲梈崌偡傟偽丆偝傜偵廩幚偟偨僱僢僩儚乕僋擾嬈偑揥奐偝傟傞壜擻惈偑偁傞丅
嶲峫暥專
1乯栧揷廩巌丒嫶杮岾懢O娖挩峀褩槍殤緲Y飻g榓旻丒惣戩榊丗擾嬈暘栰偵偍偗傞僥儗儘儃偺帋傒丆擾嬈婡夿妛夛娭惣巟晹曬丆91丆31-34丆2002