農業分野におけるテレロボティクス
-外界センシングシステム-
三竿 暢広
1. はじめに
現在までに,農業分野においても様々なロボットの研究が行われてきたが,農作業および対象の複雑さから,実用化に至ったロボットはわずかである。農業のロボット化を推進する一つの手段として,人間がロボットの苦手な部分を補いながら協調作業を行うテレロボティクスの導入が考えられる。そこで本研究では,テレロボティクスにおいて重要な構成要素となる外界センシングシステムの検討をトマトの収穫作業を対象に行った。
2. 実験装置
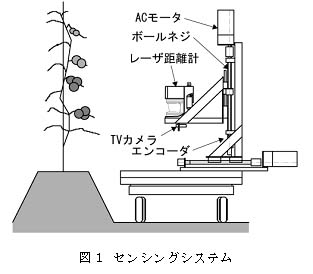
本ロボットシステムでは,外界センシングシステムを搭載したロボットが収集した圃場の情報をもとに,同一果房内の各トマト果実の認識,識別および位置検出を行い,ロボットの判断を人間がチェックするという流れを想定している。センシングシステムの全体図を図1に示す。本研究では視覚センサとしてカラーTVカメラ(以下,カメラ)を,距離センサとしてレーザ測定システム(以下レーザ距離計)を用いた。レーザ距離計は内蔵された回転ミラーにより,地面と平行な2次元平面内(最大180°)にレーザを0.25°間隔で照射し,物体までの距離情報を収集する。このレーザ距離計を上下移動させ,一定距離ごとに2次元の距離情報を収集することで3次元距離情報が得られる。そこで,上下に移動が可能なスライド(以下,上下スライド)に,カメラのレンズとレーザ距離計内の回転ミラーの中心が一致するように両センサを搭載した。上下スライドの駆動にはACモータとボールネジを用い,エンコーダで変位を検出した。
3. 実験方法
岡山大学農学部のビニルハウス内で栽培されたトマトを対象に実験を行った。実験の流れを図2に示す。
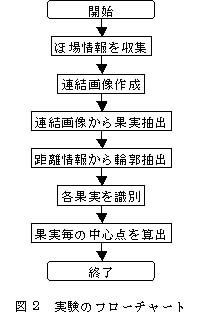
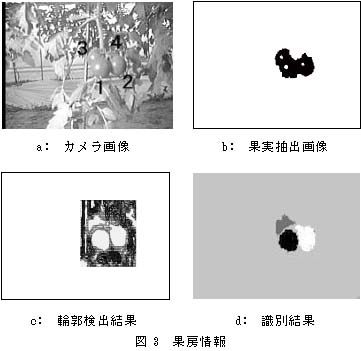
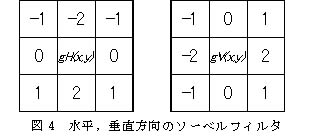
まず,上下スライドが3.3mm下降するごとに画像および距離情報を収集した。両センサの視点を一致させるために,カメラ画像(図3:a,640×480画素)においては,中央の垂直方向3画素分を抽出し,それらを連結して1枚の画像を作成した。つぎに,この連結カメラ画像の色情報(R,G,B)から「R-G>0かつR‐輝度>10」の条件を満たす画素を調べ,熟した果実だけを抽出した(図3:b)。そして,果房内の凹凸の程度によって各果実を識別するために,3次元距離情報に対してソーベルフィルタを用いて,個々の果実の輪郭を算出した。今回用いたソーベルフィルタは,注目画素の周囲8近傍に対して図4のような重み付けを設定しており,水平および垂直方向の1次微分をそれぞれ行ったあとに両者の絶対値を加算し,エッジを検出する。
このとき,抽出画像を中心とした一定の範囲のみにフィルタをかけることで作業効率を高めた(図3:c)。ソーベルフィルタ処理を行った結果と抽出画像を重ね合わせることで,果房内の個々の果実を識別,ラベリングし(図3:d),各果実の3次元位置を算出した。
4. 結果及び考察
実験の結果,距離情報に検出範囲を設定することで,果実検出に必要のない背景情報を消去し,対象付近の情報のみを抽出できた。また,カメラ画像だけでは複数の果実かどうかの判断が難しい場合でも,距離情報を併用することで各果実の識別が可能となり, 45個の熟した果実に対して36個の位置を正しく検出できた。検出に失敗した果実のほとんどは,図3:aの4番の果実のように果房の奥のほうに着生している果実であり,他の果実によってその大半が隠されたため,検出できなかった。輪郭抽出以外の果実検出法を組み合わせて用いることで,検出率をより上昇させることができると考えられた。
QTムービー
QTムービー