農業分野におけるテレロボティクスの研究
橋本 幸太
1. はじめに
農業用ロボットにおいて視覚部や判断能力は重要な機能要素であるが,その機能はまだ十分とはいえず,実用化のハードルとなっている。しかし,人間がロボットの苦手な部分を補うことにより,農業のロボット化が推進されると考えられる。本研究では,農業へのテレロボティクスの導入を試みた。
2. 実験装置
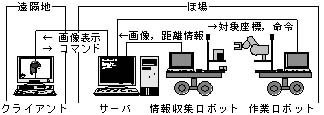
本研究の構成を図1に示す。クライアント(作業者)とサーバは一般のインターネット回線,サーバと各ロボットは無線LANを介して通信する。これにより,クライアントは遠隔地からでも圃場の管理が可能となる。本研究はトマトの収穫作業を対象とし,ロボットには三次元座標を取得するレーザ距離計とCCDカメラを搭載した情報収集ロボット,関節型マニピュレータに収穫ハンドを取り付けた作業(収穫)ロボットの二台を用いた。
3. 実験方法
まず,情報収集ロボットから送られた画像,距離情報を基にサーバがデータ収集範囲に存在する収穫対象果実の識別と代表点(中心位置)の算出を行い,その結果をクライアントのブラウザ上に表示する。作業者はブラウザ上でチェックし,ロボットの判断が正しければ収穫動作に移る。もしも誤りがあれば各修正コマンドを選択することによって,サーバで再計算や修正が行われ,その結果が作業ロボットに送られる。今回用意したコマンドは次の通りである。削除:検出された果実を収穫の対象から除外する。追加:選択された果実を収穫の対象に加える。分割:複数の果実を一つの果実として判断した場合に分割する。
4. 結果及び考察
実験結果の一例として,図2に対象の果房部分を拡大したものを,図3にブラウザ画面を示す。果実1,3と5は収穫適期の果実,2と4は薄赤色の果実であった。この場合,ロボットは隣接した果実3と4を一つの果実と判断し,果実5に対しては検出される面積が小さすぎたため,ノイズとして除去された。このため5個の果実を3個(果実1,2および3&4)と認識し,各代表点が算出された。そこで,果実3と4の分割,果実5の追加をブラウザ上で行った。また,果実2と4には収穫時期が若干早いと判断し,削除のコマンドを適応した。その結果,再計算が行われ手前の果実から順番(1,3,5)に作業ロボットによって収穫が行われた。今回は収穫作業を想定したが,防除やせん定などの作業も加えれば,さらに汎用的なシステムが構築できると考えられる。


QTムービー
QTムービー