トマト収穫多指ハンド
小林 幸司
1. はじめに
トマト収穫ロボットのハンドとして,これまでにも2枚の平板型フィンガによって対象果実を把持し,離層からもぎ取って収穫する機構のものがあったが,果柄が短く他の果実が隣接している場合などでは,フィンガ内に果実を取り込むことが困難であった。そこで,本研究では吸着パッドによって対象の果実を果房から分離し,柔軟なフィンガを果実の表面に沿わせて把持する機構を検討した。
2. 実験装置
図1に試作したハンドの外観,図2にブロック図を,図3にフィンガの構造を示す。フィンガは6つのナイロン製チューブが上部で連結されており,その内部に通されたケーブルがフィンガの先端と固定されている。ケーブルに外力を加えない場合,フィンガは開いているが,ケーブルを引くとフィンガ全体が湾曲する。長さ85mmのフィンガは半径44mmの円周上にフィンガの中心が位置するように90°間隔で取り付けられており,それらの中央を吸着パッドが通過する。吸着パッドはラックの先端に装着さており,110mmのストロークで前後にスライドする。フィンガに取り付けられたケーブルは,吸着パッドが後退するにしたがい徐々に引かれ,吸着された果実の表面に沿ってフィンガが閉じながら果実を把持する。果実を傷つけないよう,フィンガにはスポンジを取り付けた。果実を吸着したかの判断は,真空ポンプから供給される吸着パッド内の圧力の変化を圧力スイッチで検出することにより行った。ラックのスライドの前後端はリミットスイッチで検出した。エアバルブは,果実の放置時に吸着パッド内の真空圧を開放するためのものであり,吸着パッドが前端に移動してフィンガが開くと,ラックに取り付けられた金具がエアバルブのスイッチを押す機構になっている。
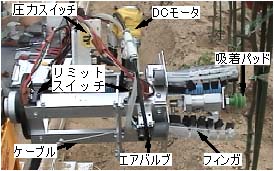
図1 ハンドの外観
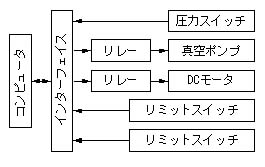
図2 ブロック図
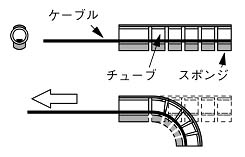
図3 フィンガの構造
3. 実験方法
試作したハンドを5自由度関節型マニピュレータに装着し,ビニルハウス内で栽培した果実を対象に図4の手順で実験を行った。果実の検出にはレーザ距離計とカメラを併用した外界センサを用いた。まず,ハンドが果実の正面に移動し,吸着パッドを前進させ,真空ポンプをONにした。そして,ハンドを目的の果実に接近させ,圧力スイッチが反応すると果実を吸着したと判断し,ハンド全体を40mm後退させ,果実を果房から分離した。次に,吸着パッドとハンドを同じ速度で後退および前進させ,果実の位置を維持しながらフィンガで果実を把持した。そして,マニピュレータのリストロール関節を回転させて離層から果実をもぎ取り,収穫トレイへ搬送した。吸着パッドを前進,エアバルブをONにし,収穫トレイに果実を放置して作業を終了した。
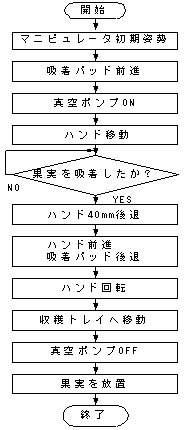
図4 実験のフローチャート
4. 結果と考察
収穫適期の果実35個に対して収穫実験を行った結果を表に示す。収穫の成功率は91%(32/35)であり,約6割の果実が離層で離脱した。収穫できなかった果実については,フィンガが他の果実や他の果実の果柄も同時に把持したことや,果実がパッドから離脱したため,ハンドの回転時にフィンガから外れる現象が確認された。また,未熟果と過熟果を対象にした実験では,成功率はそれぞれ83%(5/6)と70%(7/10)であった。これらの果実においては,果柄および離層が硬く,ハンドを回転させても離脱できない場合が多く見られた。また,すべての目的の果実をフィンガ内に取り込めたが,同時に他の果実などを把持することがあった。以上の結果より,果実との接触面積および摩擦係数がさらに大きくなるようなフィンガの構造や,果実への接近方法などを改良すれば収穫率はさらに向上すると考えられた。。
表 実験結果
| 果実 | 収穫対象果実 | 収穫された果実 |
| 収穫適期 | 35 | 32(91%) |
| 未熟 | 6 | 5(83%) |
| 過熟 | 10 | 7(70%) |
QTムービー