遠隔操作型防除システムの基礎的研究
鈴木 雄一
1. 研究目的
近年,環境負荷低減の高まりから精密農業が注目されている。現在の防除作業は農薬をうすめて大量散布するもので散布者にとって危険であり,かつ不必要な場所へも散布しているのが実態である。本研究では散布者の散布労力を低減し,散布者に農薬がかかることを防ぐために,遠隔操作のできる防除システムを開発することを目的とした。
2. 実験装置・方法
供試作物には傾斜棚プレート栽培で栽培されたキュウリを用いた。試作した防除システムを図1に示す。防除システムは上下・前後にスライドする機構,走行部,視覚部,噴霧ノズル,動力噴霧機からなり,噴霧ノズルを目的の位置に近づけ病班部に正確に農薬を散布するもので,ノズルの動きを無線で操作して,作業者は離れた地点からTV画面を見て作業ができるようにした。防除作業前にあらかじめTVカメラで圃場内の病害の検出を行い,葉の位置情報を登録し,人間はこの登録された葉に対して防除システムを操作して散布作業を行うこととした。一連の作業体系を図2に示す。
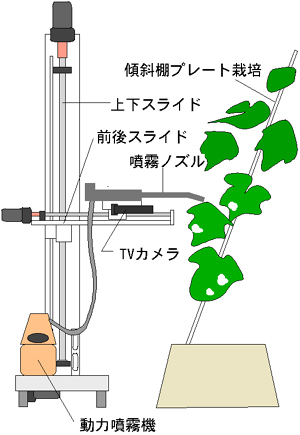 | 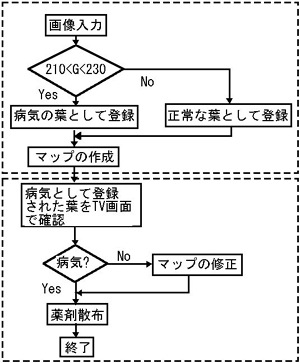 |
| 図1 試作防除システム | 図2 作業体系 |
3. 結果・考察
栽培中に発生した病害はうどん粉病とべと病で,これらはRGB画像中のG画像に注目すれば認識が可能であることがわかった(図3)。この画像処理で98%の病害葉を検出することができたが,正常な葉のうち16%を病害葉と誤認識してしまった。誤認識は鏡面反射や葉のめくれなどが原因であった。実際に農薬を散布するかどうかの判別は,人間がTV画面の葉を見て行った。こうして遠隔操作で散布を行った結果,葉一枚当たりの作業時間は9.3秒で病害葉全てに防除が可能であった。しかし4回に1回はノズルを葉の正確な位置に運べなかったので,再操作による修正が必要であった。また今回使用した農薬の残量分が白く見えたため,3%が正常な葉に散布を行ってしまった。
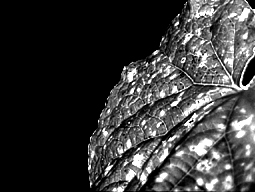 |  |
| べと病の原画像 | 画像処理後のべと病のG画像 |
| 図3 病班部画像 |