キュウリ収穫ロボットの研究
-2号機による収穫実験-
光永 賢一郎
1. はじめに
これまでにもキュウリ収穫ロボットの研究が行われてきたが,果実の位置検出に距離センサを用いていたため構造が複雑になり,制御が困難であるという問題点が残されていた。そこで本研究では,視覚センサおよびフォトセンサで果実の方向,位置をそれぞれ検出する方法を検討した。さらに果実の認識方法にも改良を加え,3種類の栽培様式において収穫実験を行った。
2. 実験装置
本研究では,誘引用のプレート,ヒモおよび摘心栽培用ネットを用いて図1に示すような傾斜棚栽培されたキュウリを対象としている。マニピュレータは7自由度の極座標型で棚の傾斜と平行に移動可能である。エンドエフェクタは,2枚の平板形フィンガ,果実を検出するフォトセンサ,果実に沿ってスライドして果柄を切断するカッタから構成されている。視覚部にはモノクロCCDカメラを用い, 550nm ,850nmの光学フィルタを切り替えて画像入力を行った。
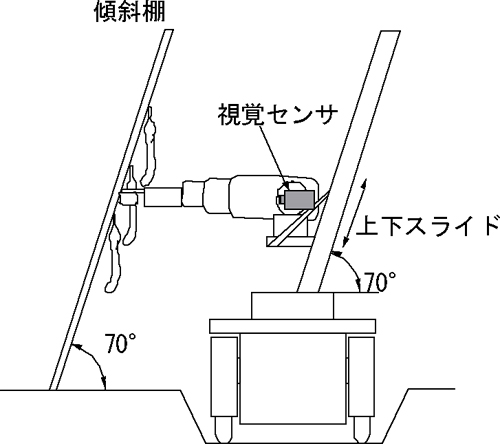
図1 ロボットシステム
3. 実験方法
実験のフローチャートを図2に示す。まず,視覚センサで画像を取り込み,果実と他の部位との識別を行う。次に果実中心線の抽出,把持位置の検出などを行い,マニピュレータが移動すべき方向を決定する。エンドエフェクタが果実に到達し,先端のフォトセンサが反応するとマニピュレータの移動を停止する。同時に,マニピュレータの移動距離から,果実までの実際の距離,把持位置,果実長を再計算し,収穫適期であればフィンガを閉じ,果柄を切断して収穫を行う。収穫実験をプレート栽培,つる下げ栽培および摘心栽培の3種類に関して行い,本ロボットシステムの有効性を検討した。
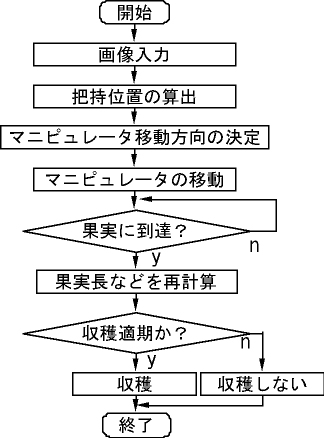
図2 実験のフローチャート
4. 結果及び考察
プレート栽培において果実の認識率は9割,収穫動作を含めた成功率では8割であった。プレートが果実と葉を分離することで認識が容易であったが,太陽が逆光の際は困難であった。収穫動作では葉柄や主茎に隣接している果実において,エンドエフェクタが収穫できない場合があった。他の栽培様式では果実が葉や主茎などの背後に位置する場合や葉がノイズとして検出される場合が多く,つる下げ栽培では認識率8割,摘心栽培では7割とプレート栽培には及ばなかった。今回対象とした栽培様式では,プレート栽培がロボット収穫に最も適していると考えられたが,さらに収穫率を高めるためには,果実を他の部位と分離するための収穫動作やそのための機構の検討が必要である。