高設栽培イチゴ収穫ロボットの研究
―フック式エンドエフェクタを用いた収穫実験―
山下 福海
1. はじめに
これまで高設栽培されたイチゴを吸引して収穫するロボットは、対象以外の果実を同時に収穫してしまうという問題点が残されていた。そこで、本研究ではエンドエフェクタにフックを用いた収穫ロボットの研究を行った。
2. 実験装置
ロボット(図1)は、3自由度直交座標型マニピュレータ、エンドエフェクタ、視覚部、吸引装置から構成されている。エンドエフェクタにはフックと果実を検出するフォトセンサを取り付け、フックには果柄を切断するためのカッタを取り付けた。また、視覚部(カラーTVカメラ)でステレオ画像法を用い、2回の画像入力によって視覚部から果実までの距離を知ることができる。
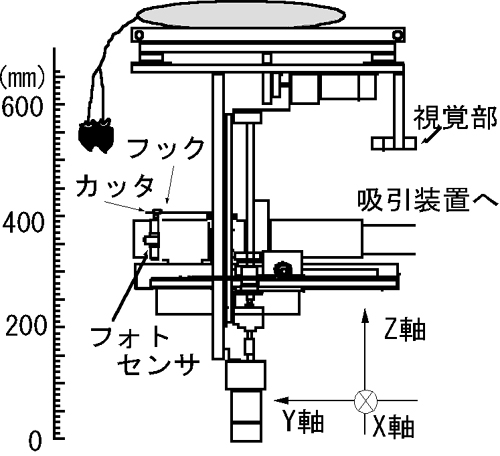
図1 収穫ロボット
3. 実験方法
高設栽培を行っている岡山大学農学部内のグリーンハウス(品種:さちのか)で収穫実験を行った。収穫方法は、マニピュレータが初期姿勢の状態で画像入力をして果実の特徴点を抽出し、果実が1つか、重なっているかを認識する。果実が1つの場合には目的果実と決定するが、果実が重なっている場合には、各果実にポイントを取り、入力された2枚の画像から、ポイントの移動距離が大きい方を手前の果実として認識し(図2)、エンドエフェクタを手前の目的果実に接近させる。フォトセンサが反応するとフックで目的果実の果柄のみを引き込み、対象以外の果実がエンドエフェクタ内に取り込まれることを防止する。フックで果柄を引き込んだ後、吸引しながらエンドエフェクタをY軸後方に移動させ、カッタで果柄を切断して収穫する。
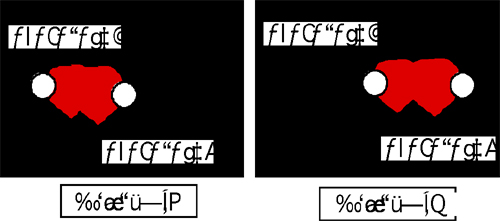
図2 入力画像(X軸方向移動距離100mm)
4. 実験結果と考察
対象果実36個のうち、72%を収穫することができた。対象果実以外を同時に収穫した場合はなかったが、目的果実の28%が収穫できなかった。収穫できなかった状況としては、フォトセンサが反応しても果柄のたわみからフックが届かない場合や、画像処理において、特徴点の抽出に失敗した事によって生じる位置検出のずれから、果実がエンドエフェクタの一部に接触した場合があった。従来のエンドエフェクタに比べ、果実の同時収穫は改善されたが、目的果実の収穫率は減少した。今後は,エンドエフェクタの先端部分とフックの形状を検討するとともに、画像処理において正確な果実の位置関係を検出することが必要である。