擾栻嶶晍僲僘儖偺墦妘憖嶌
摗郪丂慞媣
1. 尋媶栚揑
丂擾栻嶶晍偼墛揤壓偵廳憰旛偱峴偆偙偲偑懡偔丆栻嵻偵怗傟傞偙偲傕懡偄嶌嬈偱偁傞丅傑偨丆巗斕偝傟偰偄傞嶶晍婡偱偼昦斄晹暘傊偺慖戰揑側嶶晍傪峴偆偙偲偑偱偒側偄偺偱丆昁梫埲忋偵擾栻傪巊梡偟偰偟傑偆丅偦偙偱杮尋媶偱偼嶌嬈幰偺楯摥椡寉尭丆埨慡偺妋曐偍傛傃栚揑埵抲傊偺揔検嶶晍傪栚揑偲偟偰丆墦妘憖嶌偱嶶晍偺峴偊傞杊彍僔僗僥儉傪奐敪偟丆偦偺憖嶌惈偵偮偄偰専徹偟偨丅
2. 幚尡憰抲偍傛傃曽朄
丂嶶晍懳徾偼孹幬扞僾儗乕僩嵧攟偺僉儏僂儕偱丆帋嶌偟偨杊彍僔僗僥儉傪恾偵帵偡丅嶌嬈幰偼TV僇儊儔偐傜偺塮憸傪尒側偑傜墦妘抧傛傝憖嶌傪峴偄丆僲僘儖傪3幉曽岦傊堏摦偝偣栚揑偺梩偵嬤偯偗丆僲僘儖愭抂傪夞揮偝偣偰滊昦晹偵擾栻嶶晍傪峴偆丅崱夞斾妑専摙傪峴偭偨僇儊儔偺埵抲偍傛傃儌僯僞悢偼昞偺捠傝偱偁傞丅僇儊儔偼CCD僇儊儔偲3D僇儊儔傪梡偄偨丅3D僇儊儔偼塮憸曄姺婍偲僔儍僢僞僌儔僗傪梡偄偰棫懱帇傪昞尰偡傞傕偺偱嫍棧姶傪摼傞偨傔偵梡偄偨丅僇儊儔埵抲A丆B偼忋壓僗儔僀僪偵傛偭偰堏摦偟丆A偼偝傜偵僲僘儖偲嫟偵堏摦偡傞丅僇儊儔埵抲C偼忋晹偐傜慡懱傪尒搉偣傞埵抲偵屌掕偟偨丅嶌嬈幰偼偁傜偐偠傔嶣塭偟偨嶌暔慡懱偺幨恀傪尒側偑傜栚揑偺埵抲偵僲僘儖傪桿摫偟偨丅傑偨僇儊儔偑2偮丆儌僯僞偑1偮偺応崌偵偼嶌嬈幰偑僇儊儔偺愗傝懼偊嶌嬈傪峴偭偨丅幚尡偼4柤偺旐尡幰偵僲僘儖愭抂偲10枃偺梩偵晅偗偨億僀儞僩偵懳偟偰嵟抁嫍棧偑10cm偵側傞傛偆偵憖嶌傪峴偭偰傕傜偄丆埵抲偺惓妋惈偲嶌嬈帪娫傪寁應偟偨丅
3. 寢壥偍傛傃峫嶡
丂1偮偺嶌嬈曽朄偵偮偒1恖4夞偺帋峴傪峴偭偨寢壥傪昞偵帵偡丅嶌嬈帪娫偼慡偰偺梩傊偺嶌嬈偵偐偐偭偨帪娫偺暯嬒偱丆栚昗偲偺嵎偼栚昗偲偟偨売強偐傜僲僘儖愭抂傑偱偺暯嬒嫍棧偱偁傞丅嶌嬈帪娫偵娭偟偰偼僇儊儔1偮傪梡偄偨匑丆匘偑懍偐偭偨偑丆埵抲惛搙偱偼2偮偺僇儊儔傪梡偄偨懠偺曽朄偵偼媦偽側偐偭偨丅匒丆匓丆匛偼摨摍偺寢壥偲側偭偨丅偙傟偼慜屻曽岦偺嫍棧傪摼傞偨傔偵巊傢傟偰偄偨埵抲C偺僇儊儔偱慡懱傪尒偨偐傜偱偁傞丅傑偨丆恖偵傛偭偰偼匘偺曽朄偱匔偲摨摍偺帪娫丆惛搙傪摼偨偑丆3D僇儊儔偼偐偊偭偰尒偯傜偄偲偺堄尒偑懡偐偭偨丅偙偺僇儊儔傪巊偄偙側偡偨傔偵偼懡彮偺孭楙傪梫偡傞偲峫偊傜傟偨丅嵟傕惛搙偑傛偔丆斾妑揑嶌嬈帪娫偑抁偐偭偨偺偼儌僯僞傪2偮巊梡偟偨匔偺曽朄偱偁偭偨丅偙偺棟桼偲偟偰丆2偮偺儌僯僞傪摨帪偵斾妑偟側偑傜嶌嬈傪峴偊傞偨傔偵埵抲攃埇偑偟堈偐偭偨偙偲偲僇儊儔偺愗傝懼偊憖嶌偑昁梫側偐偭偨偙偲偑忋偘傜傟傞丅
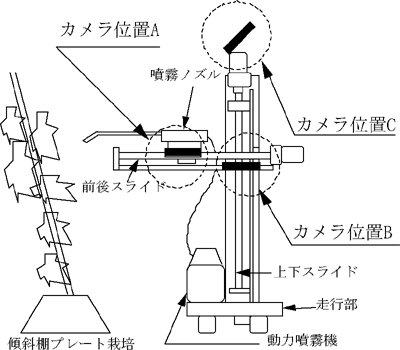
恾丂妘憖嶌宆杊彍僔僗僥儉
昞丂嵽幙偺斾妑幚尡寢壥
| 丂 | 埵抲 | 僇儊儔偺庬椶 | 儌僯僞悢 | 嶌嬈帪娫(s乯 | 栚昗偲偺嵎 (cm) |
| 匑 | B | CCD僇儊儔 | 1 | 153 | 3.6 |
| 匒 | B丆C | CCD僇儊儔 | 1 | 228 | 2.7 |
| 匓 | A丆C | CCD僇儊儔 | 1 | 214 | 2.5 |
| 匔 | B丆C | CCD僇儊儔 | 2 | 205 | 1.6 |
| 匘 | B | 3D僇儊儔 | 1 | 199 | 2.9 |
| 匛 | B | 3D僇儊儔 | 1 | 258 | 2.5 |
| C | CCD僇儊儔 |