人間協調型農業用ロボットにおける外界センシングシステム
人間協調型農業用ロボットにおける外界センシングシステム
生産システム工学 鐘ケ江修司
1.はじめに
本研究は安全かつ効率的な人間協調型ロボットシステムの開発を最終目的としている。これまでの実験の結果,ロボットは人間との接触を回避しながら安全に作業を行うことができたが,センシングシステムの対象は人間だけであった。本実験では人間以外の物体も検出,識別できるセンシングシステムの開発を行った。さらに,その有効性を確認するためにセンシングシステムをロボットに搭載し,マニピュレータ制御の実験を行った。
2.実験装置
距離センサには,0.5°間隔で周囲180°を検出可能なレーザ距離計(ジック(株) LMS200)を使用した。レーザ距離計は指向性の鋭いレーザを用いているので,物体の二次元の形状や距離が正確に検出できる。実験ではレーザ距離計を上下スライドで垂直方向に移動させることにより,物体の三次元の距離情報を検出することとした。また,人間の存在の有無を検出する焦電型赤外線センサを用い,レーザ距離計からの距離情報と融合することで人間の動きを検出した。本実験では,5自由度極座標マニピュレータを有するブドウ管理・収穫用ロボットを制御対象とした。図1にロボットの概略図およびセンシングシステムの配置を示す。なおロボットの動作としては,マニピュレータの先端を地面から一定の高さで等速直線運動させる作業を想定した。図中の色付けされた部分はマニピュレータの作業領域を表している。
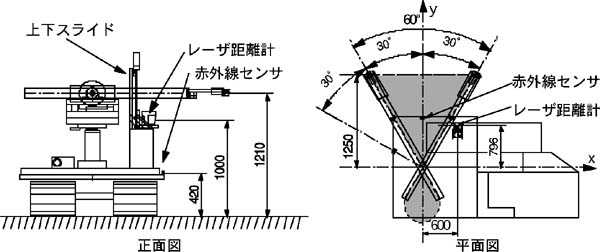
図1 センシングシステムを搭載したロボット
3.実験方法
実験のフローチャートを図2に示す。まず,レーザ距離計をマニピュレータの通過する高さより90 mm上方から300 mmのストロークで下降させる。この間に4.3 mm下降するごとに距離検出を1走査行う。各走査で得られた二次元の距離情報と上下スライドの移動量から,物体の三次元距離情報を作成する。そして,検出された各物体に関して,フェレ長比や針状比などの特徴量を用いて識別(木,支柱,枝葉など)を行う。このとき,マニピュレータの作業領域内に物体が存在すれば,その座標と幅を算出し,マニピュレータの回避動作を決定する。本実験では,マニピュレータは物体との距離を一定に保ちながら円運動によって回避することとした。次にマニピュレータを作動させる。作業中に人間が接近し,赤外線センサが反応すれば,先に収集しておいた背景の情報と比較し,人間の情報だけを抽出する。そして,その移動(位置,移動速度,移動方向)を計算し,危険度を算出する。最終的には,危険度の大きさに応じてマニピュレータの速度を4段階に変化させる。
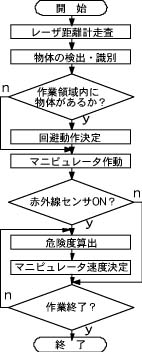 | 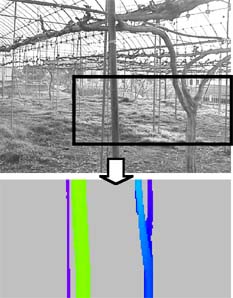 |
| 図2 フローチャート | 図3 三次元距離情報 |
4.結果と考察
図3に,写真の背景(黒枠で囲まれた部分)に対して作成された三次元距離情報の例を示す。図では距離に応じて物体を濃淡で表している。木の枝分かれした部分も検出されており,各物体の識別も良好に行われた。図4に,マニピュレータの作業領域内に直径50 mmの支柱が存在し,矢印の方向から人間が接近した場合の実験結果例を示す。図中の記号はマニピュレータ先端の速度を表している。マニピュレータが支柱を回避し終わった付近から人間が接近し,危険度が上昇したのでマニピュレータは移動速度を60,30 mm/sに減速した。さらに両者の距離が小さくなって危険度がしきい値を越えたため,マニピュレータは人間との接触を回避するために停止した。そして,両者の移動が離反の方向に移るとマニピュレータは加速を初め,再び初速度で作業を継続した。実験の結果,レーザ距離計によって人間を含む物体の検出および識別が良好に行われ,マニピュレータは不必要な停止をすることなく,人間や物体との接触を回避しながら作業を行った。
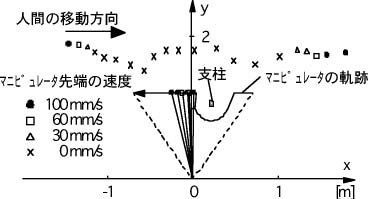
図4 マニピュレータの制御結果例